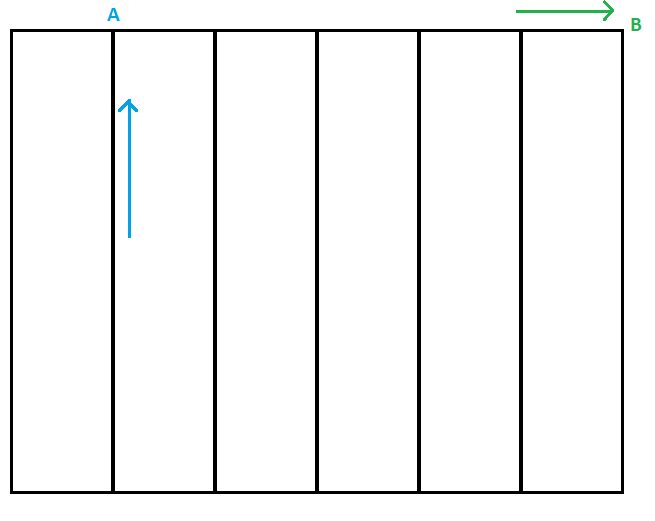
I am planning a rover which operates within a predefined grid (rows of blueberries). I believe I would make the intersections in the grid my waypoints. My question is regarding “decisions”. Looking at the attached image as an example, can I program the ArduRover so that it makes a random decision to turn left or right when it comes to intersection ‘A’ traveling in the direction of the blue arrow?
Personally I don’t think so. Using Mission Planner setting up a survey grid is easy but it follows a predetermined direction unless I am unaware of some feature.
1 Like