Since my monster drone completely crashed I had to build a smaller on: a chinese dji 450 frame and chinese pixhawk 2.4.8.
It flights ok. I built in all the knowledge I gathered from the big one:
vibration reduction - balanced props, ballanced motor (+prop), vibration pad.
air isolation (barometer) - possibly not perfect yet.
high current cables - compass question
tuning parameters - optimized for 10" props.
So the vibe values are OK X, Y <5, Vibe Z<20. The raw values are OK too (ACCX, Y < ±3; ACCZ is between -5 and -15.
But the drone (since it is light weight (with battery ~1200gramms) has a visible vibration. Not always, and can’t define a clear rule when. I couldn’t identified a regularity (in automatic landing never - after take off often, but not always).
Here is the link to the log file: https://1drv.ms/u/s!AotAJyqLFfNV7mUbazJ9xPjaoAPp?e=e6sfTj
Here is another log file from a flight today.
https://1drv.ms/u/s!AotAJyqLFfNV7mbmGa08k3XftBbX?e=L0pOtU
The first short take off shows the situattion when I eliminated the daming pad with a rubber. Here the frame vibration is very high, after I removed this rubber and the vibration values on the pixhawk decreased to a normal and correct value. (Naturally the frame vibration continued.)
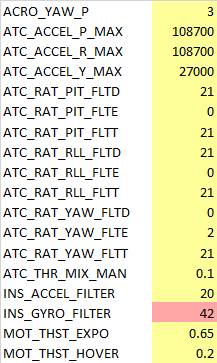
I counted it is 7Hz. - can it be in correlation with some filter values (which are 21Hz?)
I don’t think the Pixhawk causes the issue. If they work they do perform ok. But they might malfunction suddenly and cause a desaster. You should see it in the logs if the sensors are so bad they already cause issues.
It doesn’t seems bad. The internal board voltage was low(4.6V), but I added another power source and replaced the shcottky diode to a stornger one, now, it is 5V.
now I set it back to 42 - which seems solved the issue.
Although the VIBE Z increase from 10-20 region to 20-30 (but yesterday anyway was a high wind), but the visible vibration disappeared completely.