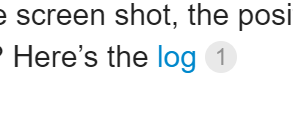
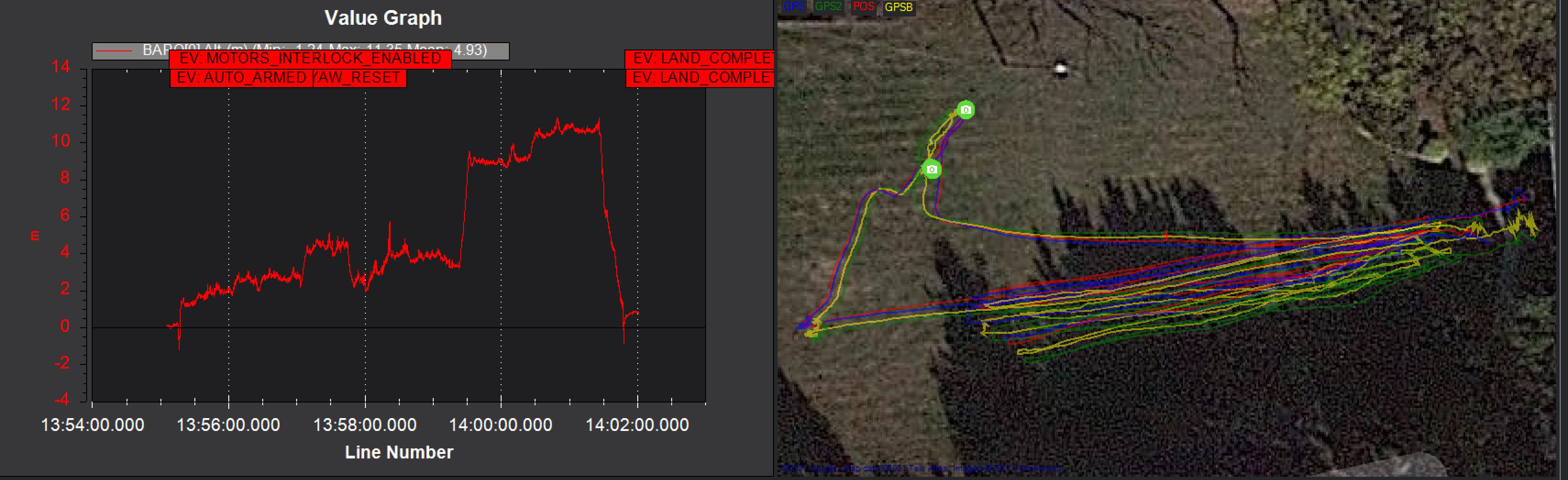
This aircraft flies pretty good, but drifts much more than it should even with an excellent GPS lock. It’s using dual m9 GPS on the CAN bus. As you can see in the screen shot, the position solution has a weird saw wave look to it. Any idea what might cause this? Here’s the log
Are your compasses/compass calibrated? Try connecting one gps, then the other, does it happen only when both are connected, but doesn’t happen when only one is connected?
Yes they are all properly calibrated. This is a test unit from my company and I have a lot of flight hours on it without any issues. The client who it borrowing this unit reported some strange drifting in loiter and this is what I saw in the log. I’ve done a lot of log diving over the last four years but haven’t ever seen anything quite like this. I will say I’m running dev 4.1 and have GPS affinity turned on. I wonder if this is some sort of glitch? @tridge
I think the jumping position is just a visualisation issue in an older version of the Mission Planner. This is certainly fixed in the latest beta and probably the latest stable as well so perhaps try updating MP from the Help screen.
@vosair sir please check mission planner beta update. then you will get right GPS track. this because of version conflict. choose beta mission planner.