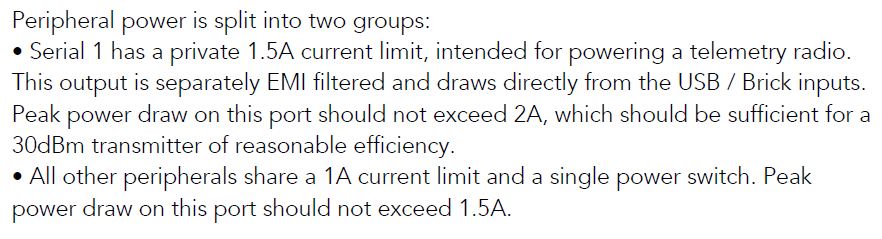
@proficnc Is this paragraph from the “Pixhawk 2 spec manual” on the proficnc store page for the CubeBlack complete set false?
1 Like
Nope.
But the RFD900 is not to be run on that port.
So then is the RFD900x spec document stating that the RFD900x gets maximum output at 5.5V and 800mA incorrect? We still power the RFD900x through a BEC set to 5.5V in critical roles, but it would be nice to be able to use the TELEM1 port as a power source for quick airframes that are not high risk.
1 Like
@TunaLobster is your BEC redundant in power like the Pixhawk? That’s the main reason I’d like to power straight off the Pixhawk.
so can you be specific as to what the problem is with this? Many people say they do it and its fine. We poer ours seperately but have lost telemetry on multiple occasion due to BEC’s dying. Redundant power from the pixhawk seems nice compared to that.
No the RFDESIGN docs are fine.
Maybe someone like Jeff Wurzbach can give the details as to the math involved, but things are not as straightforward as simply looking at voltage and current sometimes.
Basically, this rule… connect external power to the RFD900 has been there for over 5 years! This is not new information and is covered in the Ardupilot wiki. This applies to ALL FLIGHT CONTROLLERS regardless of manufacturer
We have a 6.6V plugged into the servo rail for servo power then take a BEC from the servo rail to the RFD to avoid a ground loop.
I can state from personal experience that the RFD900x draws enough (at full power) to cause problems in certain situations. When I did this with a PixHawk powered over USB, the PixHawk would often lock up.
If you can’t power from an external BEC, you can reduce the transmit power. If you drop the output power from 30 dBm to 20 dBm, the required current drops from ~1.2 Amps to ~.3 Amps.
RR
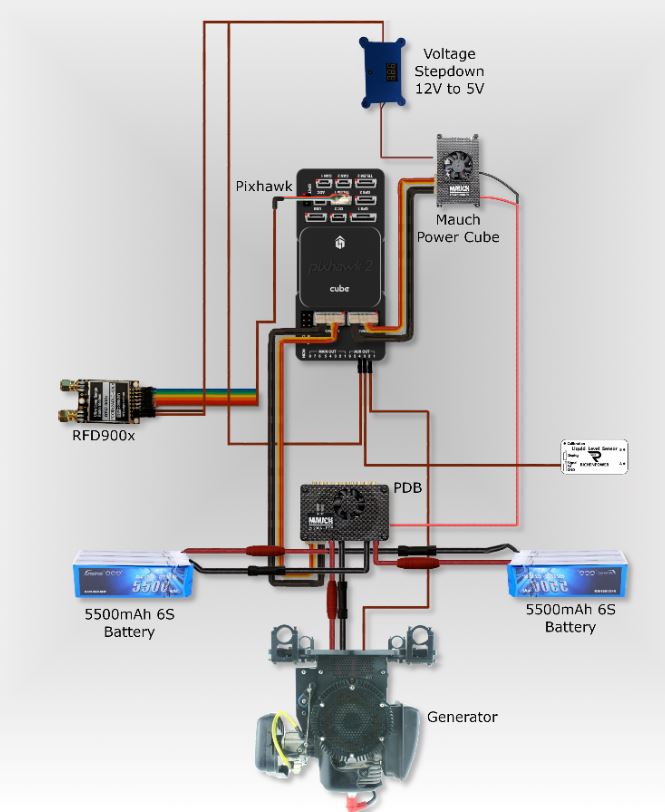
I’ll be powering my RFD900x off the power cube in my setup. Unfortunately the one on the aircraft doesn’t have 5v out, although you can get a power cube with 5v which would negate the need for a BEC/step down. The power cube provides redundant power as the air frame has redundant power sources, obviously this isn’t applicable on every air frame, but it’ll solve my power issues for the time being.
So, it may be something inherant to our system, but we’ve lost multiple Mauch Power cubes. Some of these have resulted in losing telemetry in flight. I would not consider this a redundant system, and the reason I’m participating in thread is because of this exact issue. I need redundancy outside of the powercube, like that presented in the Pixhawks power system.
So, if this is a known concern, and its something that consumers want, what stands between you and making the Pixhawk compatible with this power output? I would gladly buy a new pixhawk for all my frames if I could ensaure redundant power this way without adding some other redundant methodology to complicate things.
You could hook up two BECs potentially, doesn’t seem very practical or efficient to me but I’m unaware of any BECs with built in redundancy and we’ve ruled out the pixhawk as a safe power source. I agree that it would be very convenient to solely use the Pixhawk.
We build an autopilot, NOT a power distribution system.
Where should it stop? The ESC’s? What power? 500A?
We stated, and have done for actually nearly 7 years that the way to power the RFD900 is as per the recommendation of THE MANUFACTURER OF THE RFD900
By the seperate power pins of the RFD900…
Flight safety is our primary concern.
I actually will not be continuing this discussion.
Topic closed
Mauch has a post-cube redundancy system we have yet to integrate, but, its another piece of hardware.
1 Like
I believe I understand what you’re saying. Which is the system isn’t designed for that, and you don’t want to change a stable design. The RFD900x requires certain power which the manufacturers recognize that the Pixhawk cannot safely supply.
I don’t think you’re hearing what I’m saying. Which is that some large portion of your customers would like to see this capability. We understand that the cube was designed around certain expected power outputs, and then other manufacturers made equipment requiring more power than that.
Totally understandable, it means you made something succesful and an ecosystem grew around that, congratulations. What we don’t understand is why you haven’t made your system more compatible since, as you say, “for nearly 7years” you’ve known about this desire (we could ask RFD the same question, but we understand that power out is power in, and we want a 1 watt radio). If there is a fundamental hardware problem to overcome, that’s understandable. If there is a cascading effect that would require massive weight gain to the whole product, or a huge re-design, we can understand that. But you haven’t answered that question. You just keep getting angry and defensive, instead of helping us understand, which if we can’t have a cube that can power an RFD900, is all we want.
Why not have a look at the over 60 carrier boards that other partner companies make, and see if they work better for you?
It’s not that I don’t see your point, I do!
But our only priority is the absolute best in flight control.
If the market is so desperate for a carrier board that somehow magically separated all the potential problems from the flight system, why hasn’t anyone built one?
We license the carrier board design and patent for free! We would welcome an 80th carrier board design to the market.
The reason I don’t want to continue this discussion, is that I was up till 3:00 helping people, this morning I was up at 5:00 trying to figure out how to get key people on the ardupilot and PX4 team to agree to not let some people destroy UAVCAN, and since then I have been on 6 forums answering questions about various topics in the community.
I have answered this topic in detail, and I’m not angry about it. If Matt C feels he needs an ego boost by bashing me, that’s fine, whatever…
I treated you with the utmost respect, and I have run out of useful things to add to the topic.
2 Likes
Hmm, this is an interesting thread.
I do understand the desire for simplicity (least possible components) and redundancy in power supply.
My primary concern with my devices (15+kg TOW) however is safety of the primary flight function. If one of those things hits somebody…
So my design philosophy has always been a) to separate primary flight control from secondary functions as much as possible and b) have redundancy where possible.
My solution to power redundancy has been the Mauch PowerCubes. Not cheap but very solid and availabe with up to 4x redundancy. I use two power feeds from the Mauch cube to redundantly power the cube and then the two others to power ESCs, radios etc.
Christian
3 Likes
So with everything stated above. Can someone point me to the best standalone BEC or power supply to power the RFD900x on a xuav Clouds Plane mounted in the tail? Thank You…
Not sure how much room you have but you also don’t need anything super fancy. The Mauch Powercubes are very good but also very pricey.
In the past I have also used these simple 5v BEC rated for 3A and had no issues for a very small fraction of the price.
I’m not doing anything fancy, but I’ve used small DC-DC converters like the one listed immediately above in multiple RC planes (with multicopter ESCs) to power servos with no problems.
Note that if you want redundant power to the telemetry radio you will need something fancier than simply connecting the outputs of multiple BECs. Something like this: Simple Bus-Tie Circuit using Schottky Diodes - RC Groups .