Me again with Pixhawk question, Thanks in advance for any help.
Using a Pixhawk px4 in Mission Planner with Arducopter Heli version 3.5.2 is it safe to use the Servo Output screen to adjust trim an collective servos when leveling the swashplate? I know before in earlier versions (Version 3.2.1) of APM helicopter a person had to use Full Parameter list to make any parameter changes?
With ver 3.5.2 is it safe to use the Helicopter Setup screen to make adjustments?
Thanks
No. Don’t use the helicopter setup screen. Sorry 
Yeah, what Bill said. If you switch to using beta Copter 3.6 (which is almost to stable release) then you can use the heli setup screen in QGroundControl to level your swashplate, make throttle settings, etc…
The heli setup from 3.5.2 to later versions of 3.5 and 3.6 are totally different, so unfortunately the heli setup in QGroundControl will only work right with 3.6 and newer.
If you go to 3.6 then we have param files for the tuning you can download from here for QGC that will give you a stable flying helicopter “out of the box” with maybe only some minor changes for your particular setup.
You can also download the parameters from this link for QGC, from my GitHub repo
https://github.com/ChristopherOlson/ArduHeli/releases/download/Heli_Setup/Copter3.6_TradHeli_Setup_QGC.params
In QGC go to Parameters, Tools and load the file into your flight controller after setting up the swash, tail, etc… You will have it instantly tuned and ready for its first flight. We’re tried to make the user experience a little simpler for 3.6.
I am a Mission Planner user for years and found out that Mission Planer is very reliable in a new PC with the latest Windows OP. But a lot of people are using older Windows OP and older PC and MissionPlanner can work differently.
But on all the different systems if you are useing the Full Parameter List with write and reload it is certain the settings are done correctly. That is the reason why I do it that way too.
Guys Thanks again
I do not use the helicopter setup screen only full parameter list, What I was asking ls can I use the Servo Output screen in Ver 3.5.2 to adjust the trim on the swash plate servoswithout a problem? ( if I load newer version I have a lot of problems with Motor Interlock with my Flysky radio?)
Thanks
I would not recommend it. That heli setup in Mission Planner has known problems and it hasn’t been updated for 3 major releases.
@FRED_GOEDDERT I have not used a laptop in the field for better than two years, and most others have moved to mobile platforms as well. I use a 14" tablet that has built-in GPS and 4G cellular data in the field.
Laptops simply aren’t that advanced and have largely been been replaced by mobile computing platforms. QGC runs on what is now the two most popular computing platforms on earth - Android and iOs. MP doesn’t. So it has been necessary to move on to a more modern, actively developed, and up-to-date cross-platform application for heli.
If there is a chance of bringing the Heli setup page in Mission Planner up to date (Robert Lefebvre!?) I would vote to keep it. If not than it better be removed.
MP is maintained by one person. We cannot develop for it. It is based on .Net which is a legacy Microsoft API. In the mean time we built a new heli setup page for QGC. It works, and it runs on anything, is not tied to one plaform. Can prepare flight plans with it on a tablet and transfer them to your Windows or linux machine. Can import and export map and elevation tile sets between any platform. The interface is the same no matter what you run it on as it built on Qt. QGroundControl is also the official reference implementation for MavLink. @DonLakeFlyer has been very helpful in getting it implemented for heli and it what we moved to.
The heli setup screen in MP was very useful when it worked.
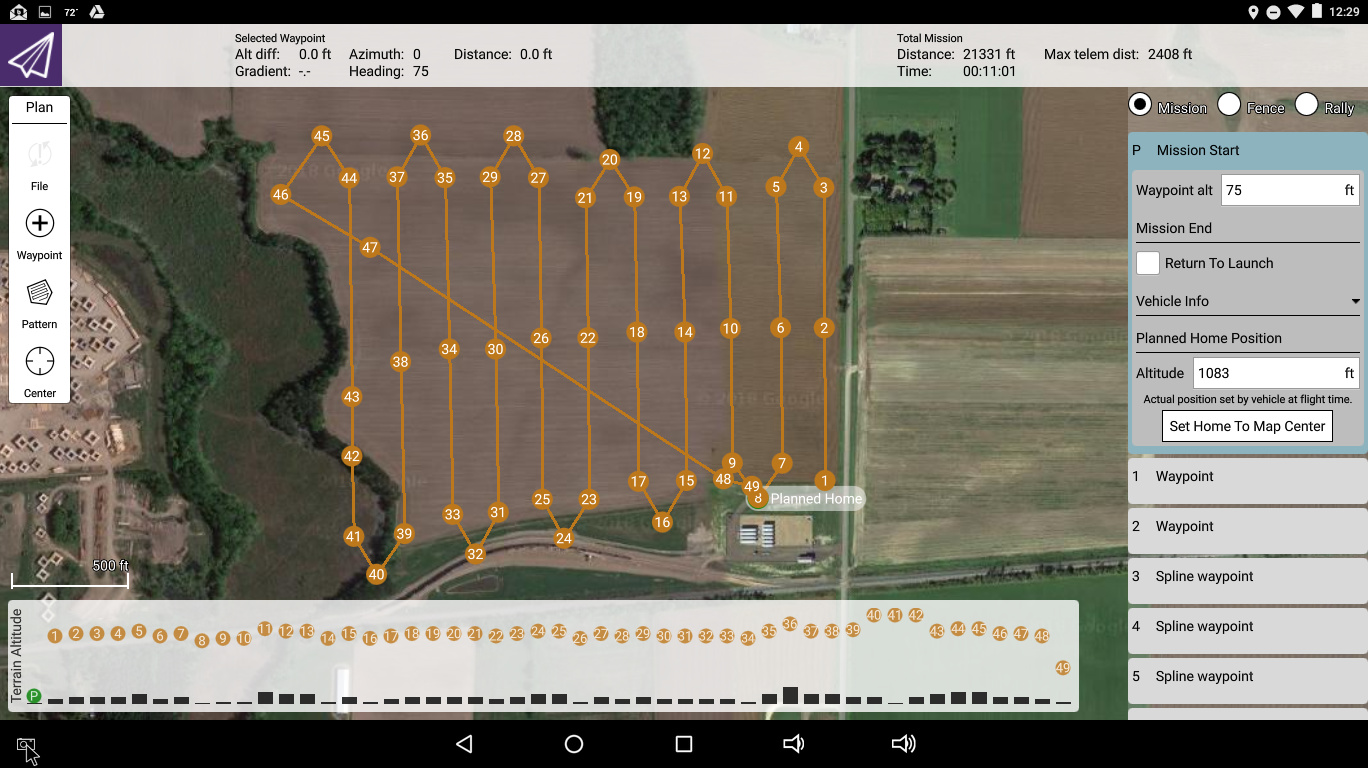
I also still prefer to plan and run my missions in MP. I’ve also yet to figure out how to use the survey tool in QGC and make it autogenerate spline-waypoints.
1 Like
I’ve never been able to use the auto-generated surveys at all. The spline paths aren’t straight enough so the overlap is inconsistent and it doesn’t do the turns right. I manually lay out all my flight plans and use straightening waypoints on the passes to prevent altitude error and straighten the path between three points.