Not sure if it was the camera angle or ground, but the craft didn’t look level. You can level the rotor disc (in helicopter terms) and click the level horizon button in MissionPlanner without doing any other calibrations. Try and get this as exact as possible.
I think some people make the mistake of leveling the Flight Controller, or assuming they are on level ground and their landing gear is all perfect and equal (and it’s not).
I use a very light weight level I made out of a piece of aluminum angle with a bubble level glued in the middle. Rest it across the motors or hub of the props and put spacers or wedges under your landing gear to get the craft level in each direction.
Also there seemed to be small oscillations, as per the tuning guide you might want to try changing these:
ATC_RAT_RLL_P,0.13500000536441803
ATC_RAT_RLL_I,0.13500000536441803
ATC_RAT_RLL_D,0.003599999938160181
ATC_RAT_PIT_P,0.13500000536441803
ATC_RAT_PIT_I,0.13500000536441803
ATC_RAT_PIT_D,0.003599999938160181
to this:
ATC_RAT_RLL_P,0.1215
ATC_RAT_RLL_I,0.1215
ATC_RAT_RLL_D,0.00324
ATC_RAT_PIT_P,0.1215
ATC_RAT_PIT_I,0.1215
ATC_RAT_PIT_D,0.00324
…and see if that makes any difference. If it does help but not enough reduce them by a further 10%
As a separate test, increase ATC_ANG_LIM_TC from 1 to 2 and see of that smooths things out.
Don’t change many things at once, make 1 change and retest, or you’ll never figure out what the fix was. If something doesn’t help, probably change it back to what it was.
What ESCs do you have?
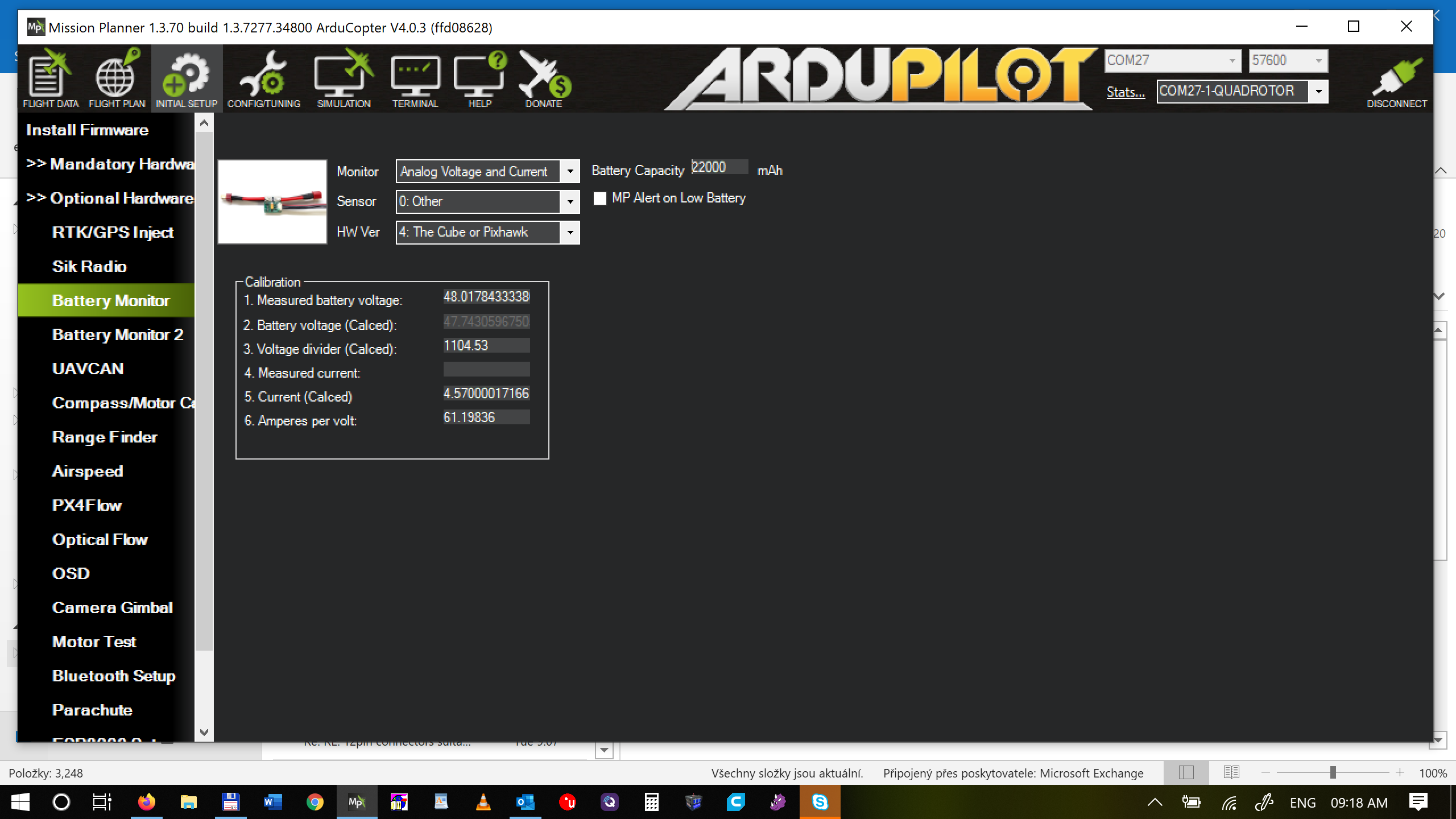
Please try to sort out the voltage monitoring and current monitoring before flying any more, there’s usually nothing wrong with Mauch sensors. Check the documentation and diagrams on their site.
Everything must run through that current sensor; battery -> current sensor -> everything else (BECs, ESCs, gimbals, everything!)
You could try another “power brick” but make sure it will handle the voltage and current., and calibrations starts all over again
Once that’s sorted, put in place the correct 12S battery/motor voltage settings.
You’ll need to rerun your Compass/Motor calibrations too.
If you end up with some improvements, probably start Autotunes and see how things go.
Hello Shawn, thank a lot for your help. I will try everything step by step. O course I have datasheet from Mauch, but in my office. I will send you scan on Monday. to set up copter correctly is pretty complicated. I should need somebody like you in my office to have free hands to do my work. Copter will be only carrier for battery of sensors. Later copter will fly with combusting engine generator and/or with our tethering station. https://www.uschovna.cz/zasilka/WV44GDHT3UUYM2A6-R3V/ This is our main job :-).
On Monday I will let you know results.
George
Your correct voltage and current sensor setting should look similar to this, with slight variation to suit your specific Mauch 200A sensor:
BATT_MONITOR,4
BATT_VOLT_PIN,2
BATT_CURR_PIN,3
BATT_VOLT_MULT,19.065
BATT_AMP_PERVLT,60.72
BATT_AMP_OFFSET,0
But you can do the calibration your self to verify. Once you’ve got it all working correctly, remember to put in these settings for 12 cell:
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
MOT_BAT_CURR_MAX,50.00
MOT_BAT_VOLT_MAX,50.40
MOT_BAT_VOLT_MIN,39.60
Thank you for your answer. Today afternoon We will test new settings. I will send you log, video and pic of Mauch doc. Yesterday I did fly for son minutes and everything looks good. But Autotune still is not done.
I attache log from yesterday. Looks stable. Mauch data from leaflet is V divider 19.04702, A/V 61.19836. I supposed that everything is sett corecly. Thank for your answer.
George https://www.uschovna.cz/zasilka/WWDKW78E2A9ET4WH-H42/
From that log, the Mauch sensor values are not set correctly; voltage and current still makes no sense.
Some of your other parameters are not as suggested either.
Try not to copy these visually and type into MissionPlanner parameter tree, you will make mistakes.
Copy and paste them into notepad (or notepad++) and save as a “whatever.param” file and then load that into your Arducopter via MissionPlanner.
Hello,
tomorrow I will do it. Used ESCs are Flame 80 HV.
Morning I will test this params. I wrote all data ccording the Mauch list, but there is problem with current. OK, tomorrow.
George
Hello, I make a new settings, but I have problem with battery voltage failsafe. I solved it. Log is included. It was strong wind, but I believe that now drone is flying well. What do you think?
Regards
George
Might need @mboland or someone more knowledgable than me too look into the attitude control and see if you’re ready to run autotunes yet. The Yaw and DesYaw looks suspicious to me.
The voltage and current monitoring are still bad.
Set this to 0
MOT_BAT_CURR_MAX,0
Did you try these settings? What happened?
BATT_VOLT_MULT,19.04702
BATT_AMP_PERVLT,61.19836
BATT_AMP_OFFSET,0
It’s like your wiring is wrong, current and voltage sensor wires reversed or something strange.
With previous settings of Batt Monitor appears FS battery voltage is low and autopilot calculates some nonsense. Dron didnt fly. I have to change settings like you see. I really do not know what should be wrong.
With Autotune I wait for better weather. Wind yesterday was about 50 km/h with blasts up to 70km/h. I will inform you. In between we are preparing next one drone for flying tests. Weight is 50 Kg without payload, motors U15II and 40 inches propellers :-). I hope it will be without problems.
Regards
George
Many times I did settings of this params. But it looks that Pixhawk has another opinion :-). Params are changed after next restart. On the other drone (copy of previous) it is working OK.
George.
Next test. During holidays I cant fly :-(. I hope wiring of Mauch is now OK. Drone weights is 47kg, propellers 40 inches. I sent a log. Could you please tel me if the settings is OK.
Thank you.
George 2020-04-16 13-23-41.zip (997.8 KB)
Hello,
I now include vireo from this flight. I am not sure if this quad if set correctly. I believe yes, but looking at its 50kgs I am not sure and I am not brave enough to start Autotune. Could you please send me your opinion? I will appreciate any help. The log from this flight is in the message above.
Thank you
George

 to have free hands to do my work. Copter will be only carrier for battery of sensors. Later copter will fly with combusting engine generator and/or with our tethering station.
to have free hands to do my work. Copter will be only carrier for battery of sensors. Later copter will fly with combusting engine generator and/or with our tethering station.