I have been have a problem with Alt Hold / Loiter height being unstable. When switched to ALT Hold and Loiter The copter will bounce up and down very sharply. This dosn’t happen in every flight (Probably one in five). If I land and cycle power the issue is gone.
I have noticed this issue with all versions of 4.0
Cube Black
Here GPS
Enclosed are two log files
2020-01-26 16-25-15.bin is the flight where the copter bounces in Alt Hold
2020-01-26 16-27-41.bin has no issue
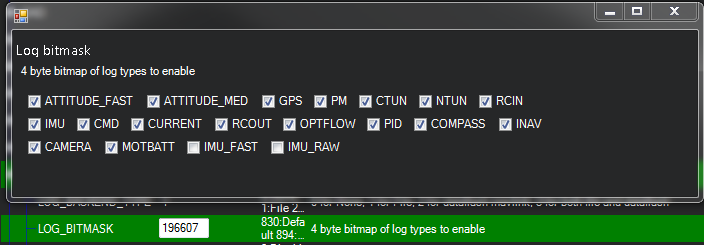
This doesn’t look like an AltHold problem but a roll and pitch problem based on the two logs you sent. I would need to see the problem with fast attitude logging and PID logging turned on to help you further.
I would suggest setting up the harmonic notch and then doing a tune with the filtering on.
Can you send me a log showing the problem with high speed logging turned on.
I can’t see any sign of alt hold oscillation you talk about but I can see signs of roll, pitch noise or oscillation but I can’t tell with the slower logging.
If you can give me a video that would help too.
Don’t worry, we will get to the bottom of this with the right data.