Hi.
Yesterday we were doing some experiment flights with our heavy-duty H type frame.
The first flight was in AUTO mode and just it was intended to climb 15m (relative) above home location, wait 60sec and land and the flight was OK but we get FailSafe (Terrain Data Missing) when the vehicle goes from third to the fourth waypoint (LAND command) and flight mode automatically switched from AUTO to RTL. Nevertheless, the flight ended safely and OK.
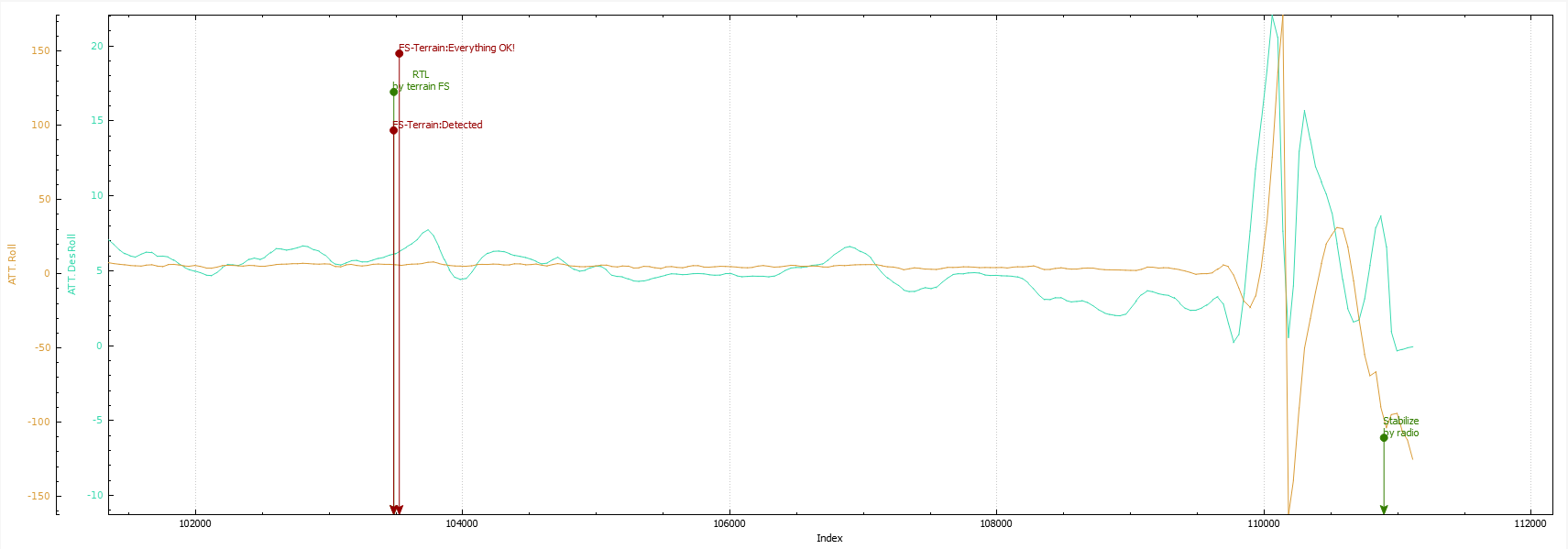
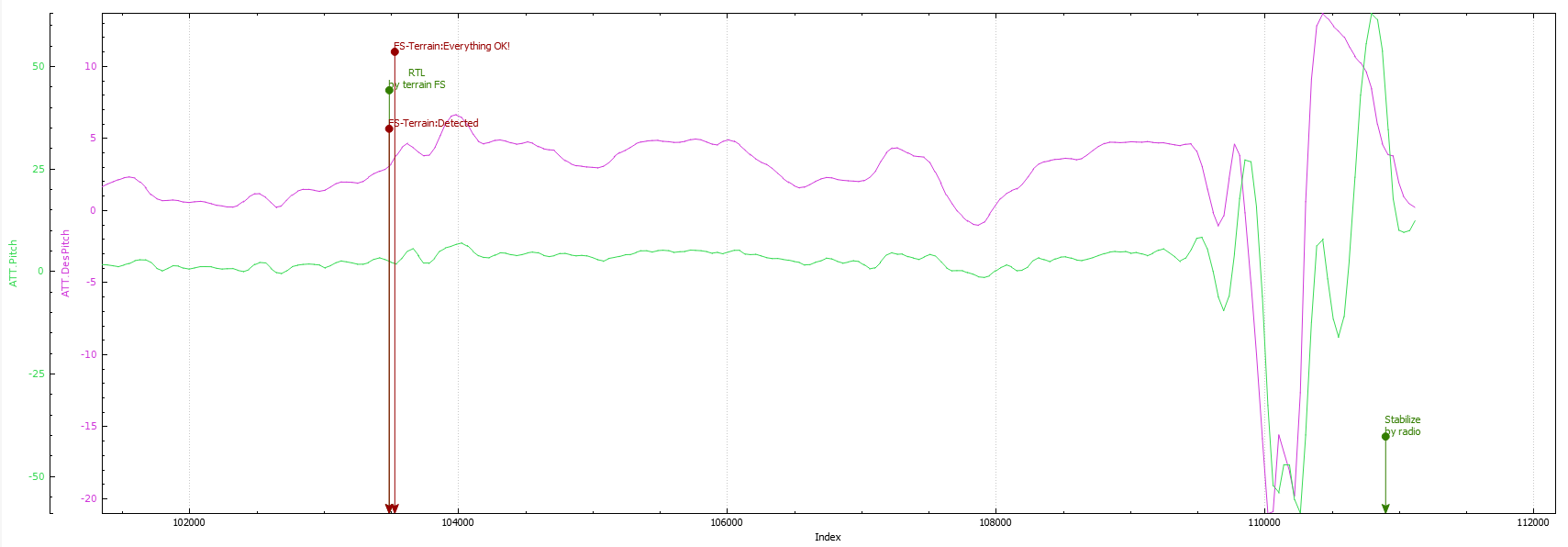
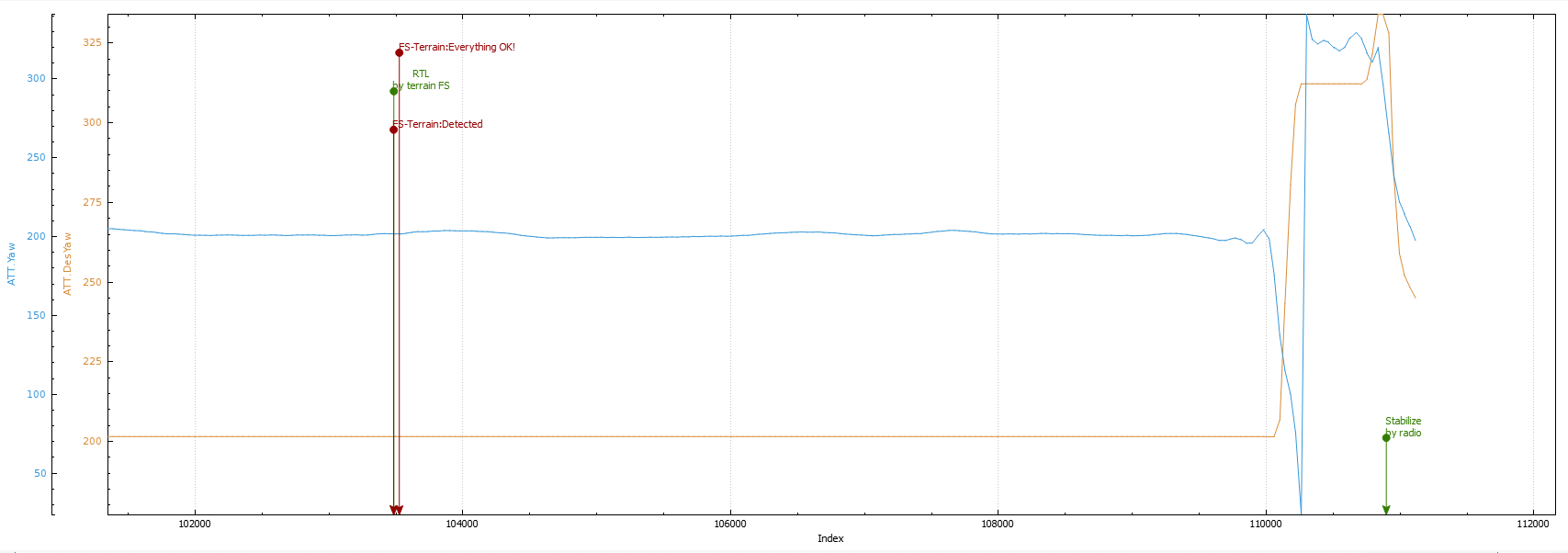
On the second flight, we did everything the same except we wanted the vehicle to climb 30m (relative). The vehicle climbed to 30m and wait 60sec successfully. When the vehicle goes from third to the fourth waypoint (LAND command), we again got FailSafe (Terrain Data Missing) and flight mode automatically switched from AUTO to RTL. The vehicle started to descending from 30m to ground. When vehicle on the 15m (relative) altitude, we experienced some incorrect behavior on the vehicle, it tilted to a side and it could not be able to stabilize itself given altitude and crashed.
Before this, we successfully did 5-6 flights on this vehicle.
Can somebody help what happened?
We are attaching flight logs, parameters, and mission waypoint list.
Thanks for your help…
Thanks for quick answer.
We were using pixhawk2 cube.
I believe there are vibration dampers inside the cube itself where imu located.
We did not use external vibration dampers because we are using pixhawk2 cube with kore power distribution board.
it seems that internal vibration dampers are not enough try to install an external one.
also check wires or other parts to don’t transfer vibration from body to FC
is motors and propellers are OK ? is propellers balanced ?
OK.
We’ll install additional dampers and will check wiring and other parts.
Could you please look at the video in the link?
We can not see any vibration from the outside.
It look like the vehicle flies fine until the crash.
We are using KDE Direct 7208XF motors and KDE 24.5x8.1 foldable propellers.
It is said that they come as balanced. https://drive.google.com/drive/folders/18oy97Bw3e7rldWedryFg643ZRNVo5aZ-
Hi, just a note, If you are using the Cube FC from Hex/Proficnc the recommended way of installation is actually without vibration dampeners (what you did)
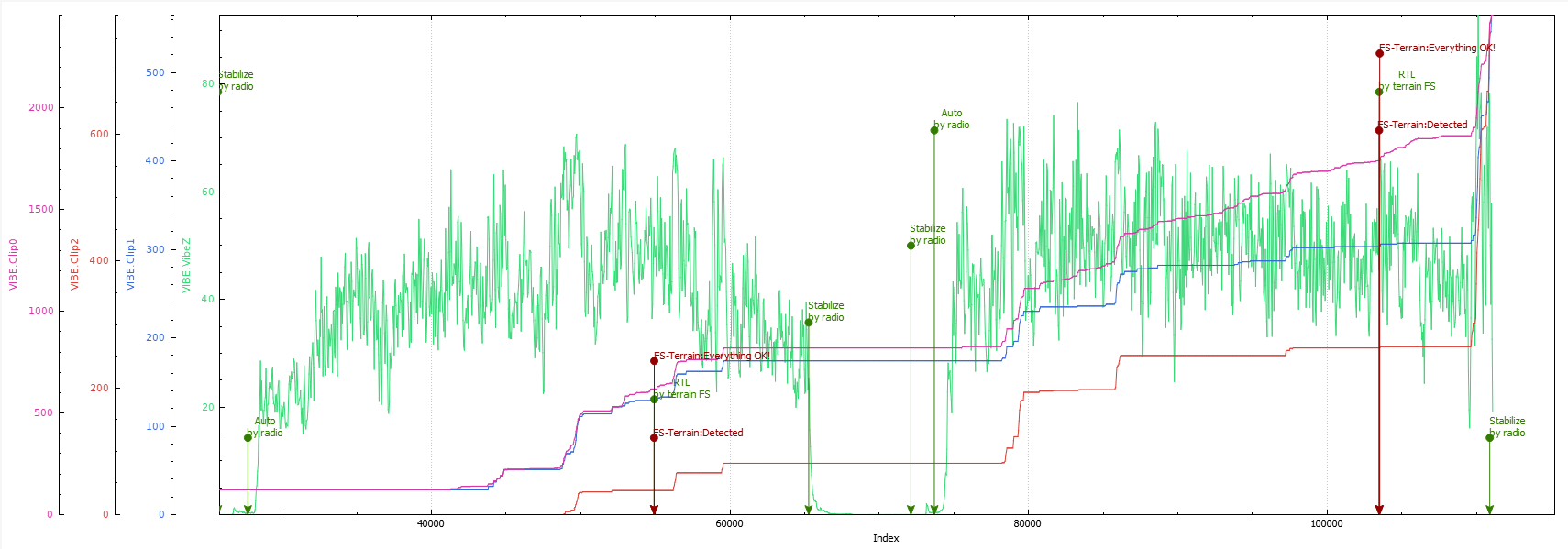
If you have vibrations especially on your Z axis you need to find the reason. It might be that motors are not leveled or vehicle arms are too flexible or not suitable for your motors. Maybe you can simply put silicon patch under each motor and resolve the issue, however, clipping must be addressed.
HTH
Gal
This might be it.
Although the arms are really strong carbon fiber tubes, since they are round, they can bend and this results entire motor mounts starts to oscillate forwards and backwards.