Hello, today we experienced unintentional hard landing.
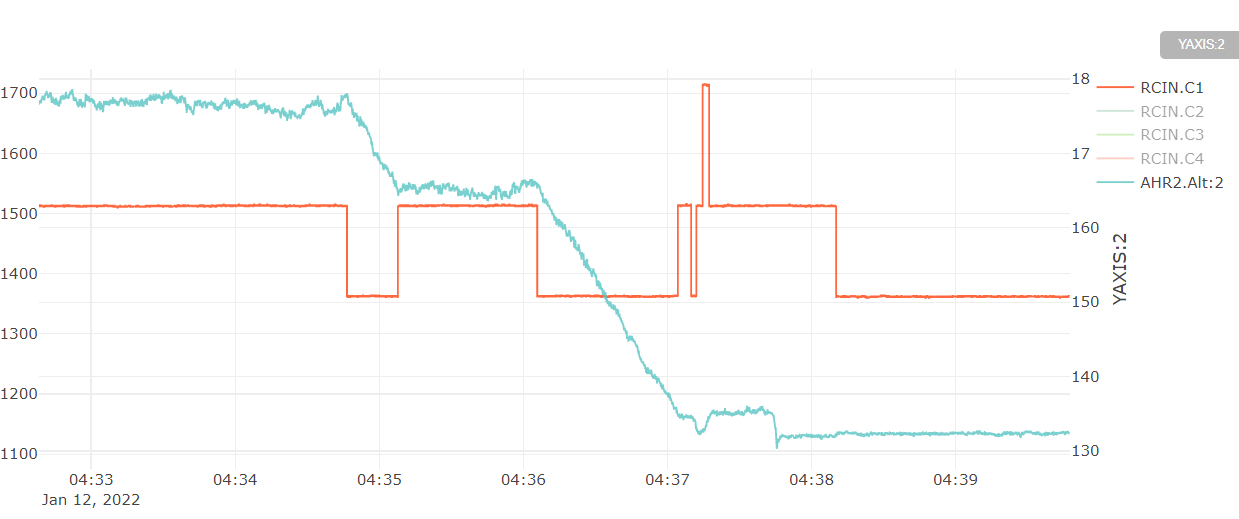
While hovering in altitude around 1.5m drone suddenly dropped on the ground at vertical speed about 2.5 m/s according to logs. The pwm input didnt change the whole time during this event. What could be cause of this ? We looked into logs but cant find the reason for this, everything looks normal to us.
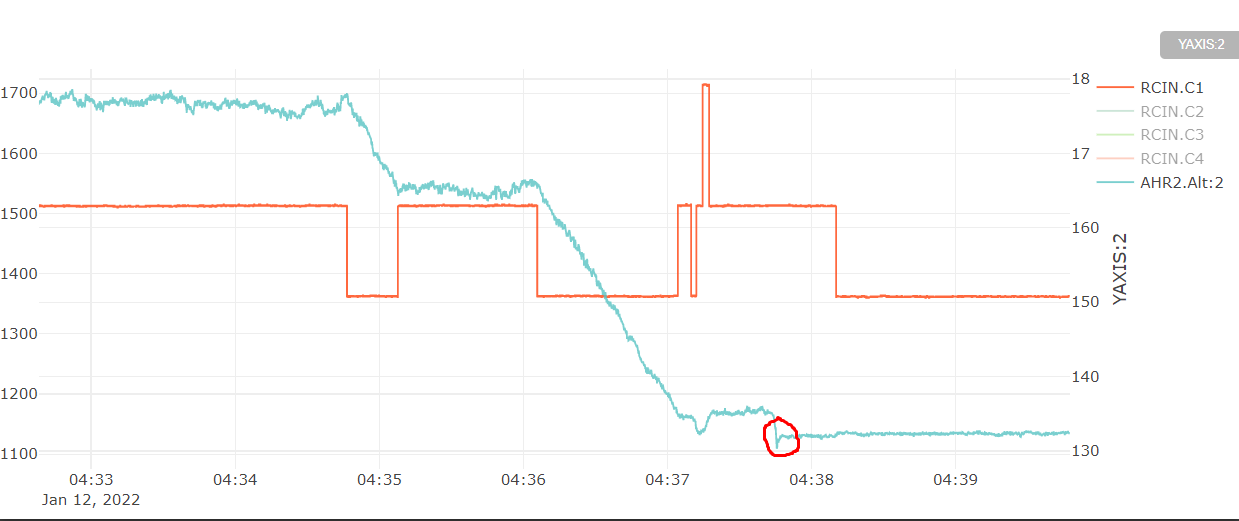
@manavgandhi17 No thats not the moment i was talking about. I did mark the moment when it happend. The one you mean was done on purpose, i stopped descent at arround 0.5m and then gained some altitude as you can see in logs. Then it dropped without change in throttle as you can see
All I could tell thus far is that the autopilot decided to decrease that altitude at a rapid pace. Desired and actual altitude match well and desired and actual climb rates both drop to very large negative values. The rangefinder you have installed does seem to go out a couple of times right before the drop - but it also gets excluded from altitude every time that happens.
Barometer and RC-In don’t seem to be the culprits. Anyone see anything different?
I got a similar problem with no error messages and a copter falling down after 10min of flight… After changing ESC, pixhaw and motors I realized that the problem came from my battery which was dead. Check it with the internal resistance (should be < 7 mOhm/cell)
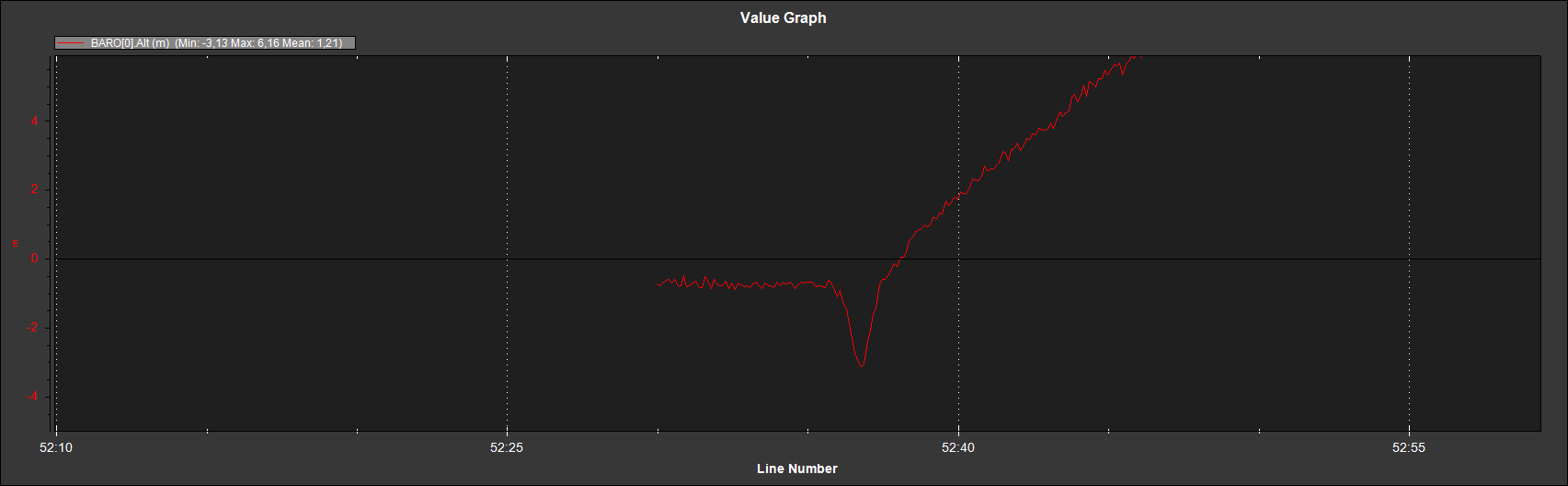
For me, I think the problem is the ground effect, I have seen that drop in a baro when the drone is very close to the floor, and you also have the same effect when you take off:
Hello, today it happend again, but this time it did happen in altitude of 10 meters and i was able to stop the descend at 2m.
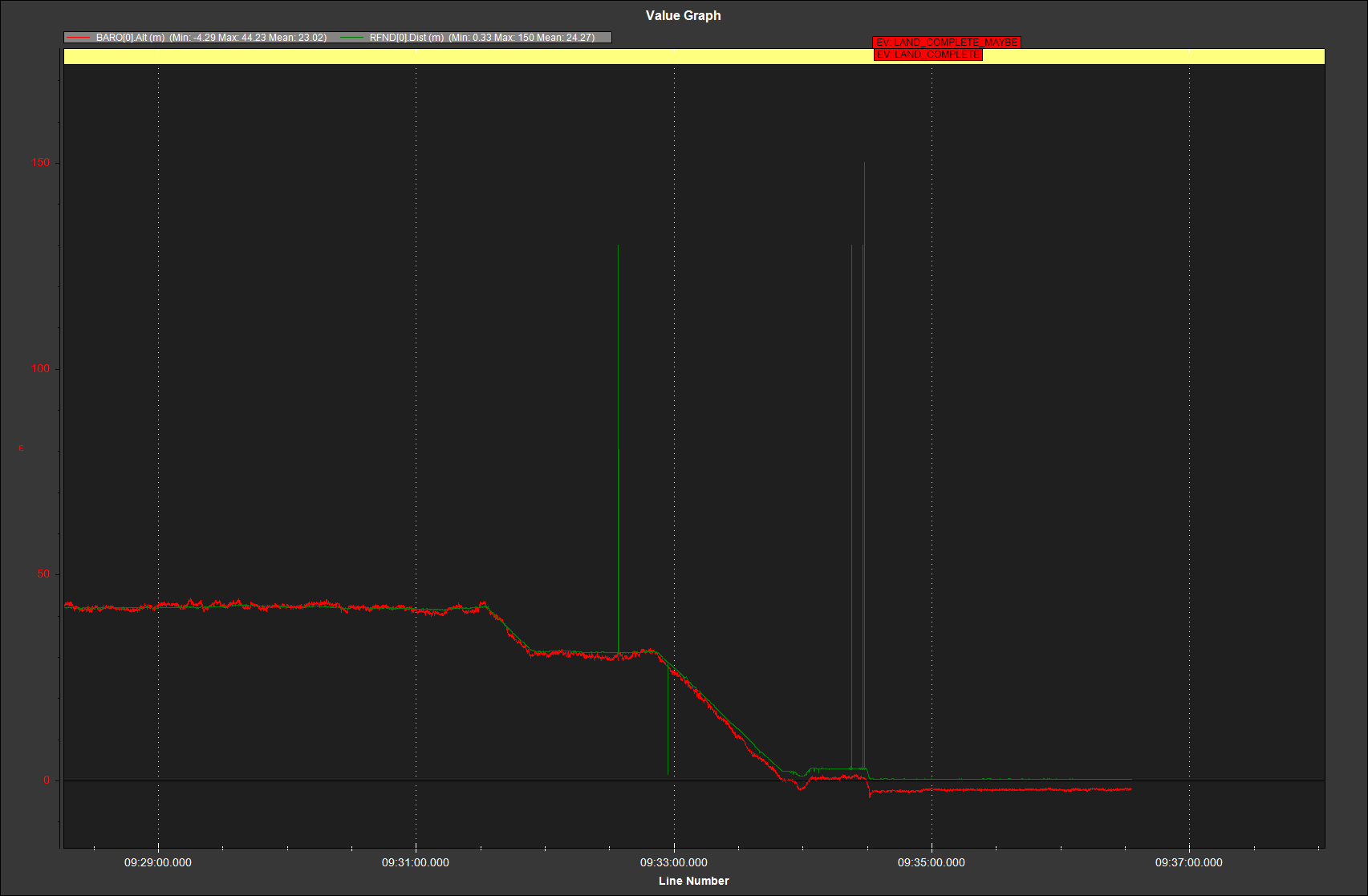
I climbed to 10m and then started to slowly descend, but suddenly drone started descending much more faster than usual (at arround 2m/s) without any change in throttle. Im attaching logs once again if somebody want to check it and maybe find something. (Btw high gains in rangefinder altitude at start was caused by reflection from irlock beacon protective lens).
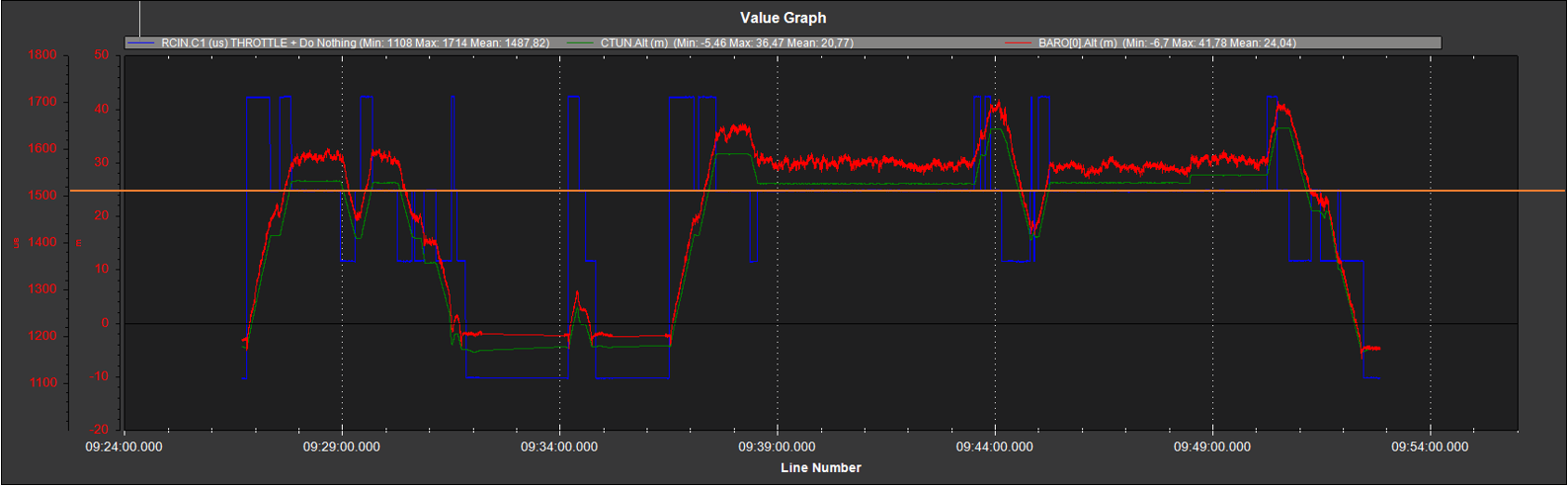
1.2.2022 BIN In this log file it can be seen at time of 9:31:29 if you check GPS VZ then you can see it suddenly starts descending at speed of 2.5 m/s. Also happend one more time at 9:34:25
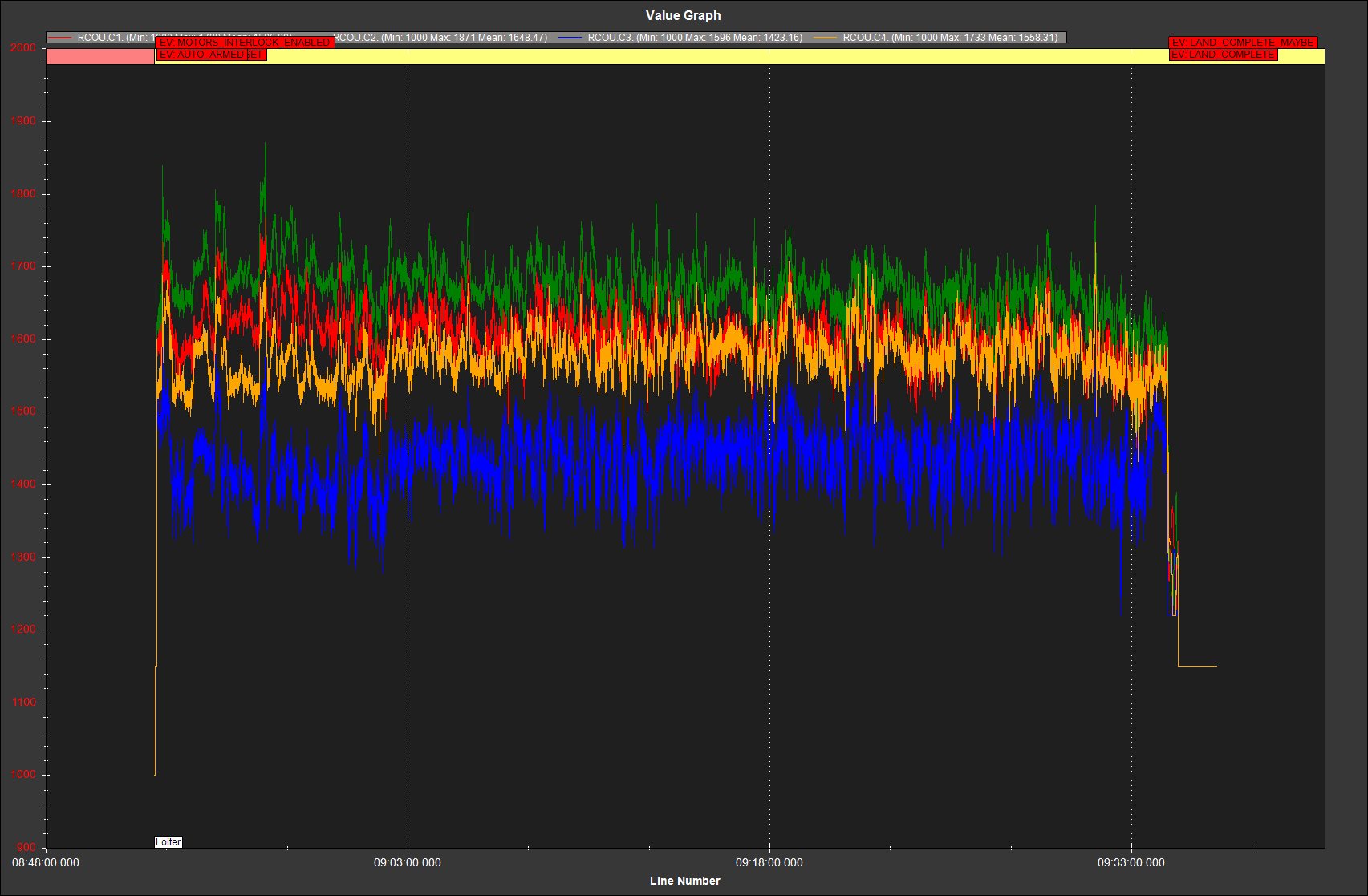
I had a look to your last log and I haven’t seen anything strange, when the throttle is under 1500us (orange line) the drone descends. Maybe I am missing something and @xfacta can see something more, but for me, in this case, the drone performs as expected.
The problem is that rate of descend changes on its own without change in the pwm throttle input. So for example lets say we are descending at constant speed of 0.5 m/s and sudenly drone starts descending at speed of 2 m/s without any change in pwm input.