I’m fairly new to this forum (and Ardupilot software) so please excuse my ignorance.
Yesterday after a lot of trial and error i did a test flight with my KDS 450 heli which ended in a bit of a crash. At the end of flight the FC cut power to the motor and i had an “uncontrolled descent” to the ground.
Could someone please take a look at my log to see what exactly caused it?
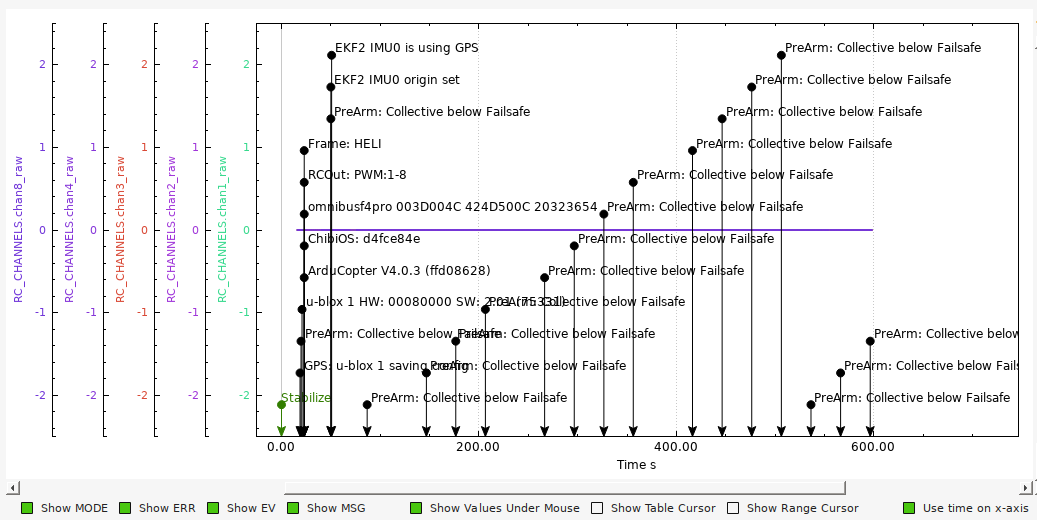
In the log i see EV: LAND COMPLETE right before the crash.
@Zaquron Hopefully you can provide a log of your flight. I would be interested to see what happened. We had another user with the same board crash. We determined from his flight log that it was an IMU failure on the board. So it will be good to see the flight log. I see that you just posted one. So I will look at it tonight.
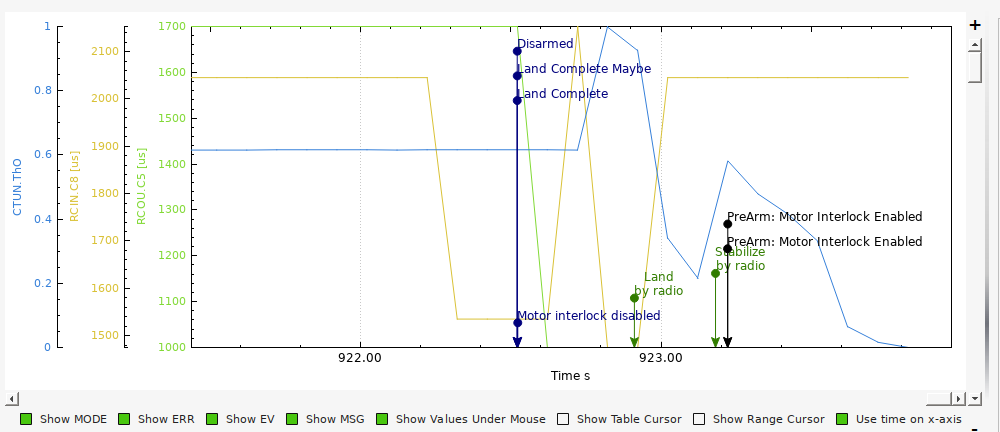
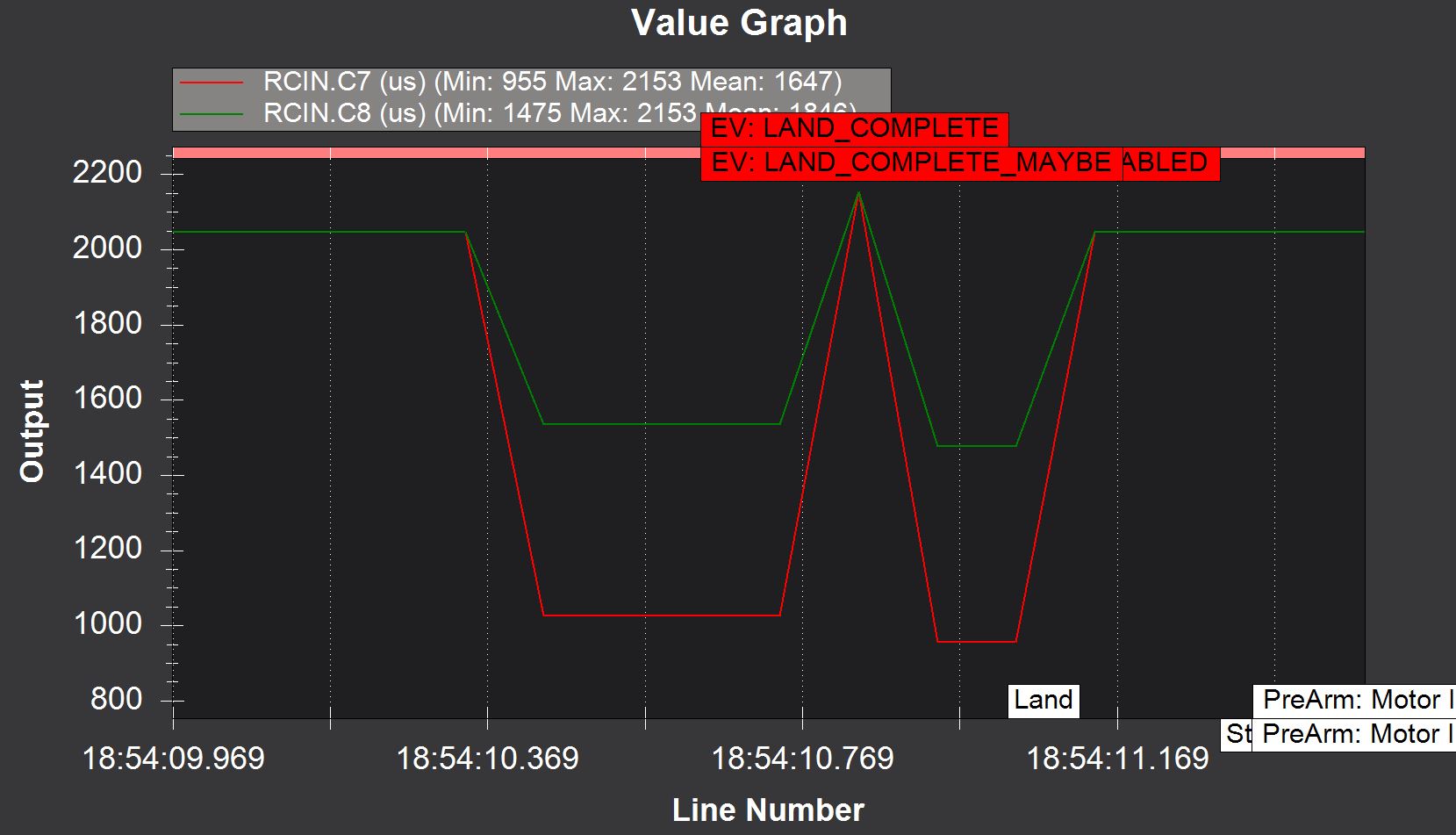
From what I can see your radio dropped the throttle signal on channel 8, which shut down the motor in flight and the throttle signal on SERVO5 went to zero.
It looks like a reasonable attempt was made at autorotation, which was hopefully successful.
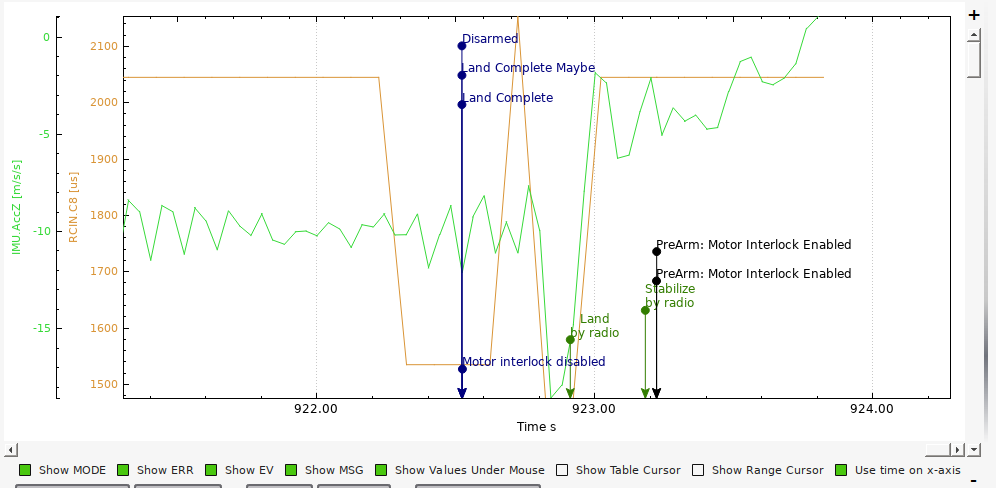
What is unclear is why your RC8 signal dropped, then it spikes to a very strange value of 2153 pwm for a split second, then back to bottom, then goes back to 2045 pwm.
It kind of looks like either a RC radio or receiver issue.
I haven’t looked that the actual log but from what @ChrisOlson graph shows. Not only did it disable motor interlock, it also disarmed the aircraft. Also why does RC8 change values in flight. I guess I will have to see what RSC_MODE the aircraft is in.
It was at very low altitude and stationary, so it thought it was landed, but collective signal was at about 60% yet. So I don’t know why it triggered land_complete and then disarmed. That should not have happened until the collective was lowered. But I’d have to look at the code to see if the handling of that is different with manual collective modes.
It didn’t really look to me like it changed in flight except for once. It held a nice steady 2045 pwm signal for the flight (up until it quit). And the throttle signal on SERVO5 was 1700 pwm (up until it quit).
It is possible it is a problem with the control too in handling the SBus signal, as what the log shows is what the control “thinks” it sees. That is why I said that spike to a value that is higher than the calibrated value for Channel 8 doesn’t look right. I don’t know if that is a problem with the controller, the firmware, or the radio. That should be impossible from the radio’s standpoint, it is possible with a failed receiver, and it is possible if the controller has/had an issue with the Sbus handling.
If there is a pwm converter on it, then it could be an issue with the pwm converter, and I have seen that before. But the log indicates SBus was being used.
It was about 2 meters from the ground, 5 meters from the transmitter.
Looking az the log i see two short periods when the channel 8 is at about 1500 pwm. This should not have happened. None of the switch positions are near that value.
Will try the whole thing tomorrow with an Frsky transmitter and an XSR receiver if the weather allows.
Assuming I do have the correct log, then I want to know why it decided to disarm at 2 meters. Even if throttle hold (or motor interlock) is engaged in flight it should not disarm in Stabilize. But it obviously did.
I can plainly see the spike in AccelZ when it touched down and then you switched flight modes. And by that time the throttle signal had come back to normal
By “two short periods” i meant the anomaly.
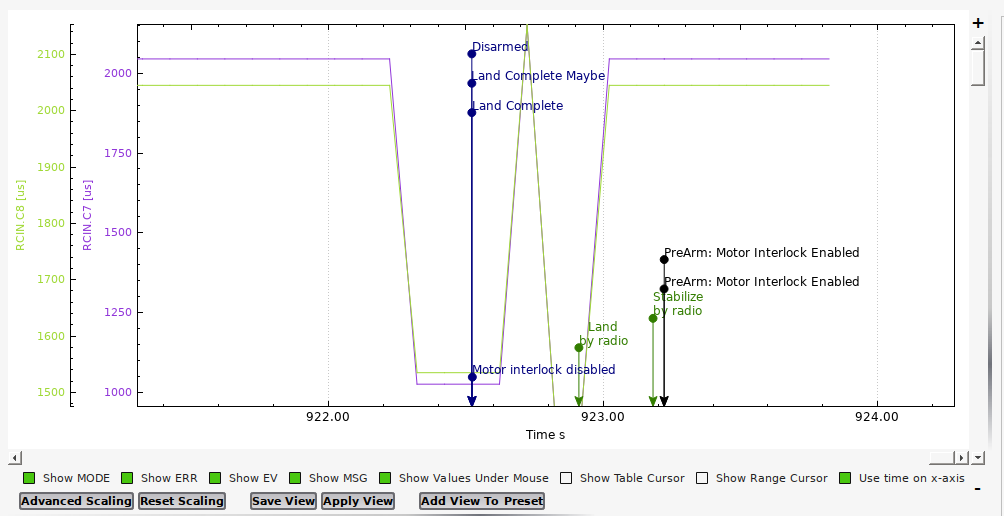
Channel 7 and 8 are assigned to the same switch.
It was the only way i coud find to disable motor interlock.
That switch may well be the problem?
I definately did not touch it during flight.
(but why did rc in 7 and 8 produce different values when it’s assigned to the same input?)
I’m still in the learning phase about this whole thing.
Ok, that’s why I see the “motor interlock” message immediately at arming.
It goes deeper than that. I graphed all the channels. They all either went to a value above the calibrated value, or a value below at the same time, except for Channel 4. It also happened on 5 and that’s what changed your flight mode - you did not do that.
So what it looks like is the radio (or receiver) temporarily went belly up. It re-bound and you got the strange values. But by that time it was too late - she already disarmed and was in autorotation. So it is definitely something in the RC. I would suspect the receiver has an issue before I would look for a problem in the radio itself.