First of all, thanks for your time and effort to help me.
Yaw command in autonomous flight can be overridden by the pilot during the auto mission. This can happen either in GUIDED mode or in AUTO mode. There are two explanations that I came up with for your problem.
You are right, the cause is really an involuntary radio change. I’ll set the AUTO_OPTIONS to ignore pilot YAW input to avoid this situation in the future.
First, assuming your radio RSSI configuration is right and you disabled radio failsafe knowing the radio connection will be lost, then either the receiver has malfunctioned or the autopilot received RC_override message from GCS. I don’t know if one can determine the reception of the RC_override messages from the logs. Can you share further information about your setup?
Yes, i disable my radio failsafe on purpose. We only fly using telemetry (RD900+). The RSSI is configured based on FRSky XM+ instruction manual. We are using FrSky X-Lite as a remote control and the short control distance is no a problem, we dont have an intention to control the aircraft using the radio beyond the line of sight.
Also, your EKF failsafe action is ALT_HOLD. Given that you intentionally do not thrust the radio and your connection would have been lost during the mission, this configuration seems a bit contradicting. In this configuration, upon EKF failsafe the vehicle will drift with the wind until the battery failsafe is triggered and if your radio trim is wrong or the dead zone is too tight the vehicle could go in any direction.
Thanks for advise, since we always flown beyond line of sight based on the telemetry, I set the EKF failsafe do ALT_HOLD to have some time to change the Flight mode to RTL in case of EFK FS occurs. We also fly with geofence and telemetry FS always enabled.
The second explanation is the radio RSSI values are not right, The RSSI value drops to zero even at 200 meters away from the takeoff location. This much degradation at a close distance seems worse than what you can achieve even with cheap radio like FLYSKY FSi6. Can you share what radio transmitter and receiver are you using?
Im using FrSky XM+ RX and FrSky X-Lite S TX.
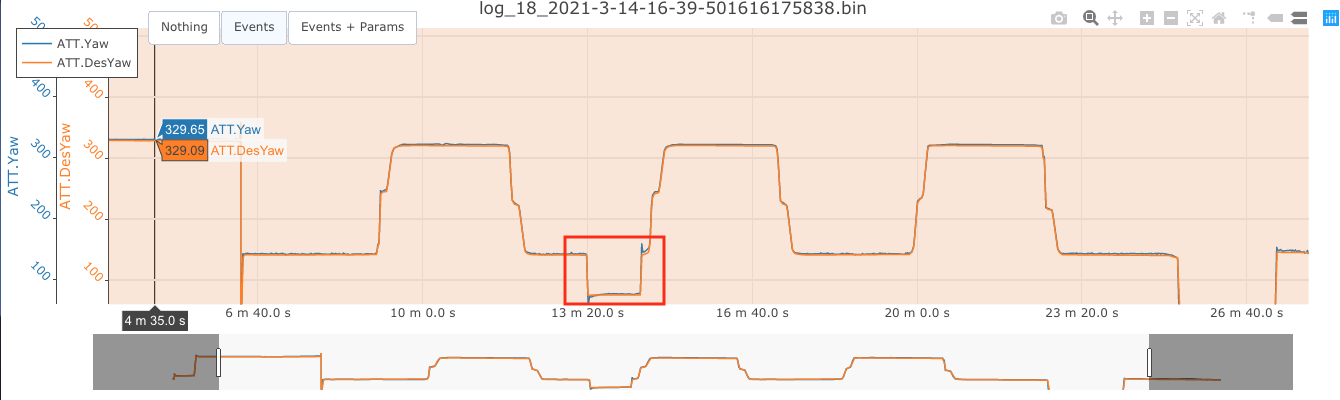
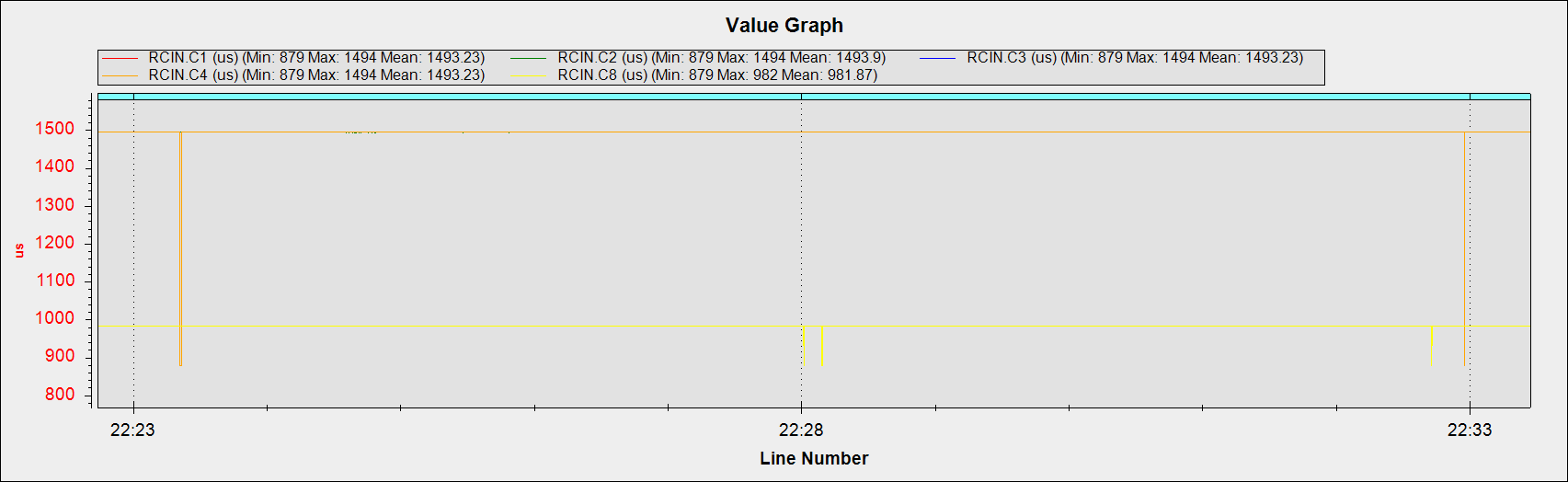
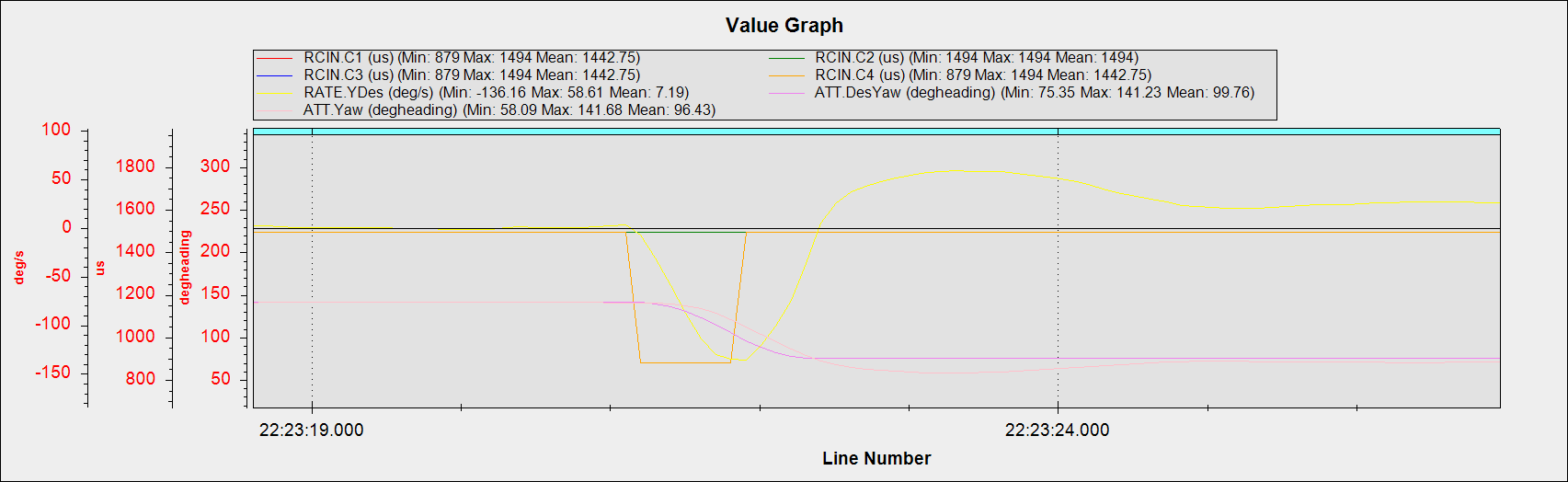
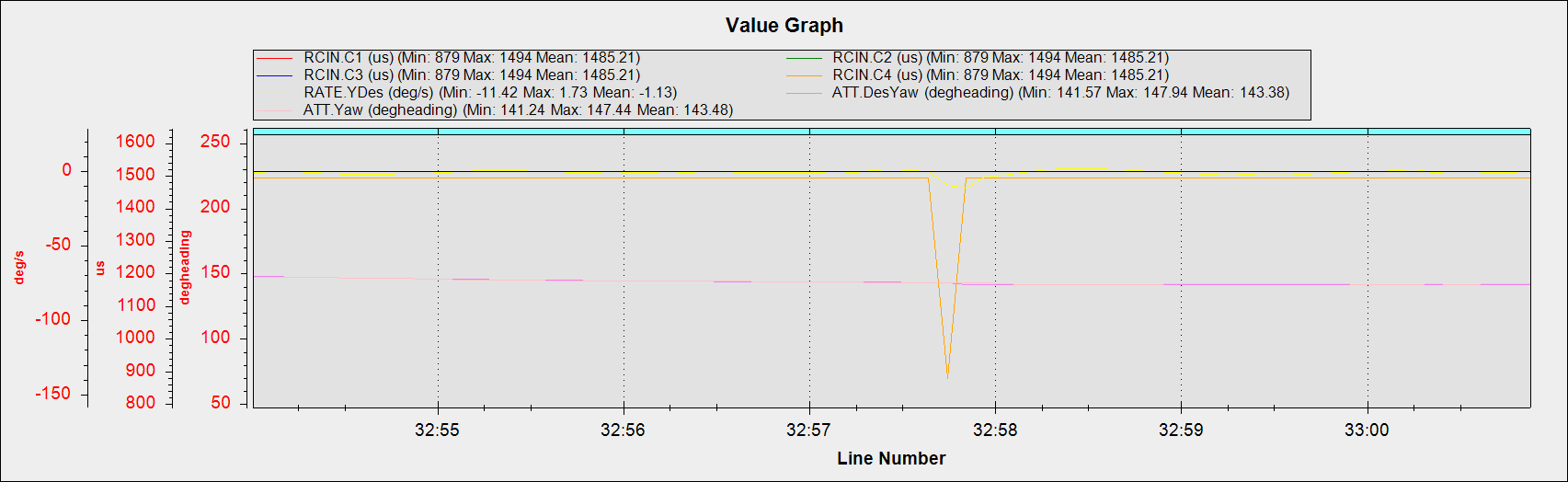
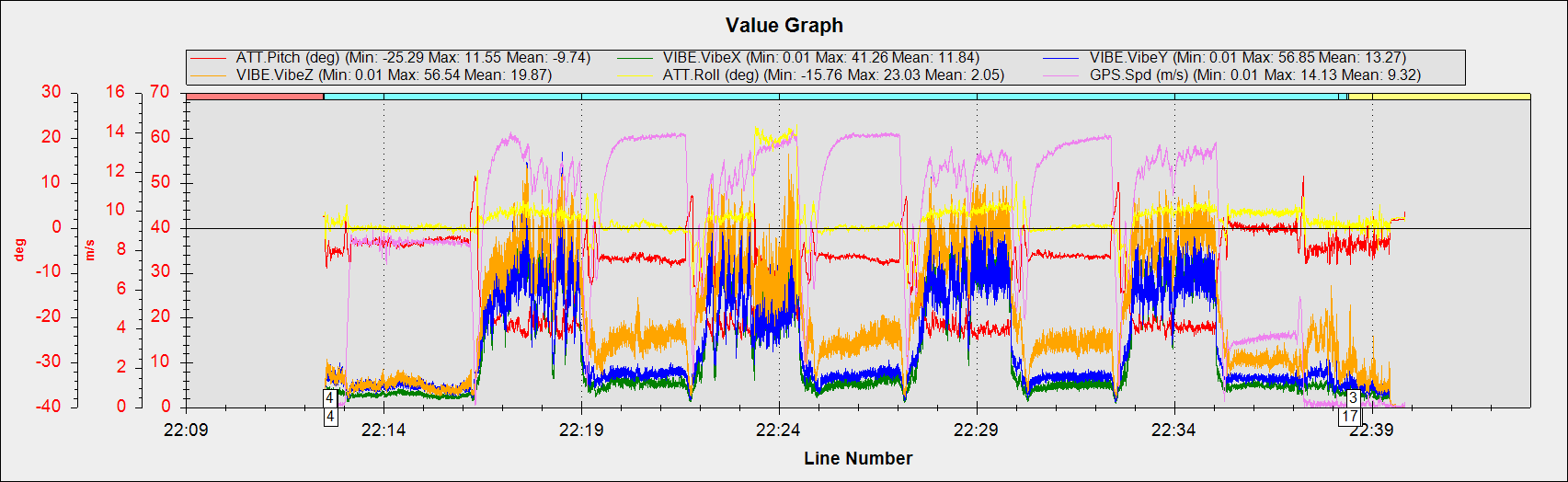
In the first instance, RC1, RC3, and RC4 drop to 879 us PWM for approximately 0.8 seconds while RC2 stayed at 1494 us PWM. This the part of the flight where your uncommanded yaw behavior occurred.
You are right, that’s the cause for the behaviour. I think it could be related with the RX Failsafe. Im going to double check to ensure it was configured to “no pulses” to avoid this unintentional changes.
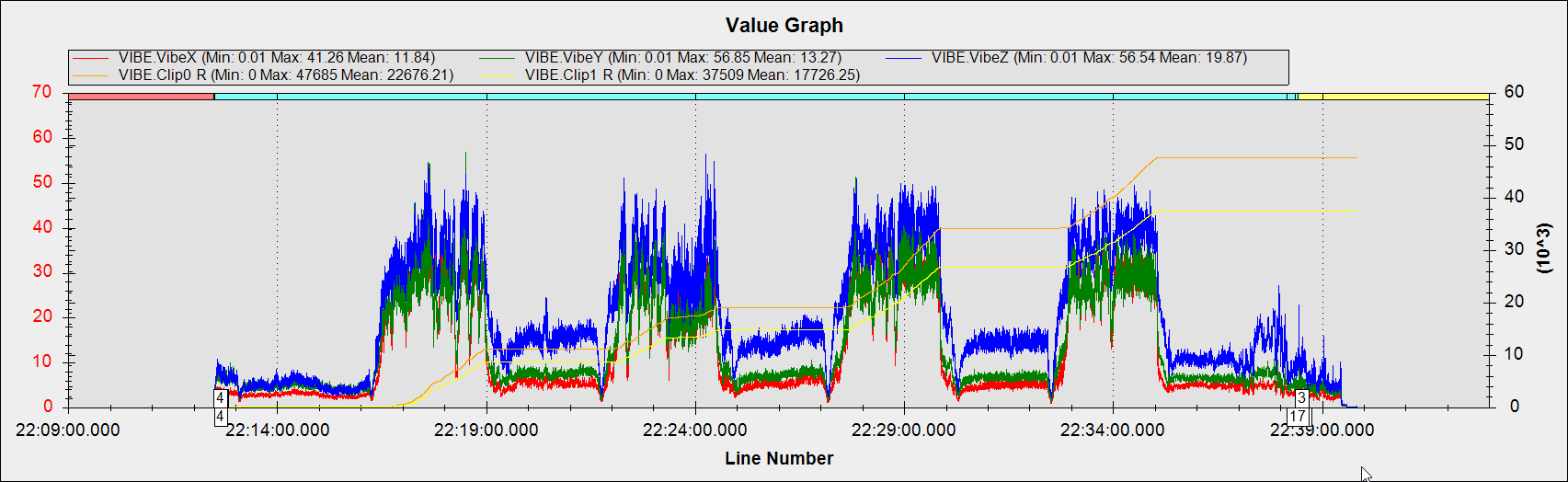
Apart from the radio issue, you have a very high vibration level. They are well above the maximum recommended limit. I am surprised the EKF failsafe did not trigger. You should give the following link a read.
You also did not configure the harmonic notch filter and you are using default controller gains.
if your ESC does not have telemetry output, you should use the throttle-based harmonic notch filter. Harmonic notch really does make a difference.
This is my next step! In fact, when i try any modification on the PID values, the copter triggers the Vibration compensation function. That is the reason to leave the PID on default settings until I configure the notch filter.
Thanks again, your well described analysis really helped me!
I’ll keep you updated about the tuning processes.