I Pixhawk’ed an S1000 and have been doing some initial testing. On the maiden flight it crashed when put in loiter mode. It rolled hard to the left and didn’t respond to a command to roll right. Chalked that up to poor compass calibration.
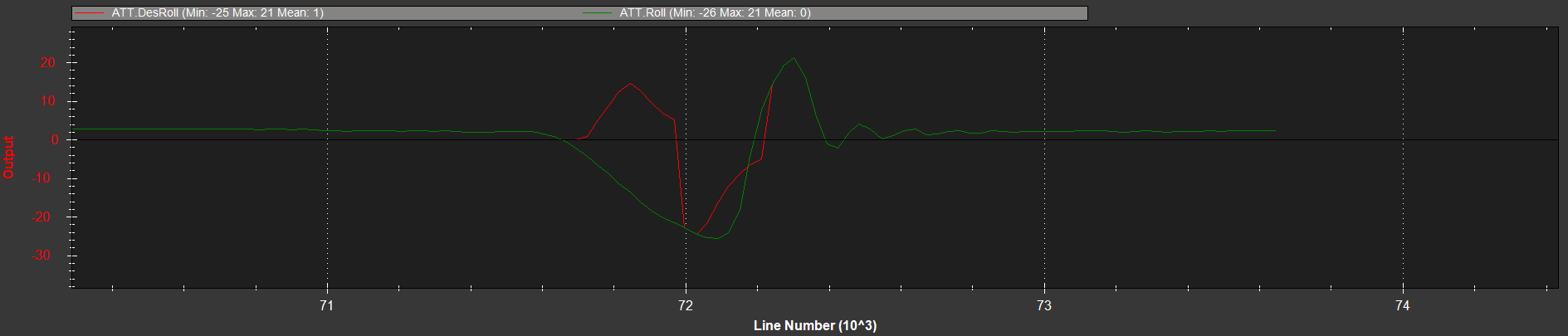
Today I’m back at it with more success staying in Stabilize mode and doing initial roll/pitch and hover tuning. That is until I went to takeoff during on one of the flights and it pitched backwards and rolled left pretty hard and broke a couple props. It did not seem to respond to a pitch/roll commands and I tried to correct it. The log shows this clearly at the very end.
The takeoff area was pretty flat and there was very little wind.

18.BIN (2.6 MB)