Hi
Im using Arduplane V4.1.0
When im flying normal in the manual mode everything works allright, but when I want to change the FlightMode to Autotune or FBWA the plane either steers straight in to the ground, or directly in the sky. Sadly this was the first and last flight, as the plane crashed in to the ground. Luckily the Log was saved, and I can make sure the same doesn’t happen again.
that is the symptom of a reversed elevator. Unfortunately many people assume that if the direction is right in MANUAL then it must be right in stabilized modes. That is not the case, as you can have both the RC input for elevator and the servo outputs reversed, negating each other. That results in MANUAL being correct, but stabilized modes being reversed.
You have to test by pitching the plane up and down while in a stabilized mode, without any stick input.
Thank you very much for the reply!
I’m relatively new to Ardupilot, and i must have overlooked that whilst configuring.
Just one last question: During the dive at the end I tried to pull the plane out, but my inputs didn’t change the trajectory. Could it be, that the due to the high speed the control surfaces where inefective?
I’ve made the same mistake once (in a rush while trying to “help” a friend out … some help that turned out to be) When you are in FBWA you aren’t directly controlling the surfaces. You are telling the FC what direction to steer the plane and FC is moving the controls. If you have the stabilized outputs reversed as Tridge says then your input to pitch up actually ends up in a more aggressive dive because the FC is acting backwards. The only way out of the situation is to go back to manual mode. Unfortunately this usually happens pretty quickly and by then a planet has already got in the way of your flight path.
Haaaa. I did the same when started flying and crashed the plane.
Never ever set any reverse or mixing on transmitter except expo and throws in mixing section.
Play around with combination of servo output and servo calibration section( transmitter input ) check boxes.
Ones you happy with outcome, put the mode in fbwa and check if your plane nose down elevator should go up, when bang left right ailerons should go up to make plane flying straight.
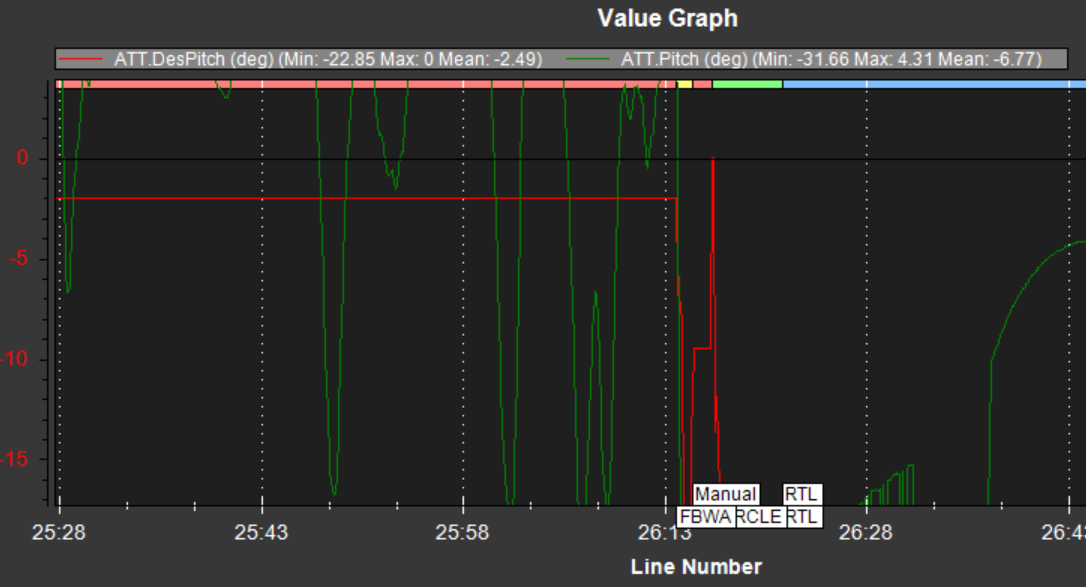
Unfortunately, I’ve experienced the same situation today during my first flight with Ardupilot. I suspect I had the elevator servo reversed (FBWA pitching nose down, the elevator would actually go DOWN [Manual had the correct UP response]). But, one thing that puzzles me is when switched to FBWA the Des.Pitch was actually -25deg, the plane nose dived to -90deg and that was the end of it.
In fact, Des.Pitch was never positive - why is that? Is that correct to assume that a reversed servo might not be the only problem?!
Very possible. Without a log it’s hard to say, and if the plane was only in FBWA for a few moments there might not be enough to diagnose, but here are a few suggestions:Tuning, Board alignment and calibration, stall.
If you are looking at the flat line of the desired pitch in the image you attached don’t panic about that. There is no value for that in manual mode so the graph just plots a line from the last known to the next recorded.
Thanks! Yup, there is literally one second between manual and FBW dive so unlikely to have much useful data. I still find it interesting that Des.Pitch was -25deg and the aircraft (with reversed elevator servo) dived down (not up).
It’d make more sense if the autopilot commanded nosenup and it did the opposite due to the inverted elevator. Most likely this is a byproduct of not having enough data.
Also, I will need to read up on how trims work in FBW, etc. I sort of skimmed through it and hoped that servo_auto_trim 1 would help with needing more back stick for level flight (CoG was on the marks, for Volantex ASW28). I also had SOAR_ENABLE 1 and TECS_SPDWEIGHT 2. I’ll try to have a better maiden flight once everything is back in one piece.
SERVO_AUTO_TRIM needs time in FBW or CRUISE mode to adjust the trim. It will also only go so far, so the plane needs to be reasonably in mechanical trim first.
I’ll try to look at the log tomorrow, I’ll post if I see anything. I won’t laugh at failed launch attempts. I have the logs and empty hot glue packages to prove I’ve been there too.
Since most of the flight was in manual it’s really hard to see much. I will agree that you had a lot of back elevator during the flight so I’d say that c of g could move back a bit. Or verify the setup of the elevator is correct, maybe the servo arm needs to be adjusted to get the control surface in trim.
It flew beautifully today! In fact, I never had a flight that was so stable in gusty wind conditions. I could actually relax, take my hands off the controls and just enjoy the experience. I’m absolutely chuffed.