Hi,
I have a 4copter with Pixhawk 2.4.8 and APM:Copter V3.5.5.
After Esc calibration (is this the reason?), now the radio don’t arm anymore.
Form APM Planner (via telemetry radio, no usb) I arm and disarm correctly, and also I can vary rpm with radio throttle. This means that the radio is running, confirmed also by the green bars on “radio calibration” screen.
But no way to arm!
The throttle excursion is 984-2006, and FS_THR_VALUE=982. Nothing appens also changing it to 1000.
Thank you in advance
Post a log from a 3.5.5 attempt to arm and arming from the GCS.
Check the rudder (yaw) excursion.
I had a similar issue with my Taranis X9E. Some times I could arm, and some times I couldn’t. Turned out to be the potentiometer on the Rudder was failing.
I preplaced the stock stick gimbals with M9 gimbals. Problem solved.
No evidence of a radio in there.
There’s evidence of a bit of incorrect calibration/corrruption in the parameters though.Such as Channel 1.
PARM, 85770941, RC1_MIN, 1498
PARM, 85771116, RC1_TRIM, 1498
PARM, 85771283, RC1_MAX, 1504
PARM, 85771692, RC1_REVERSED, 0
PARM, 85771860, RC1_DZ, 20
and also
PARM, 85741230, SERVO3_MIN, 982
PARM, 85741312, SERVO3_MAX, 2006
PARM, 85741593, SERVO3_TRIM, 982
PARM, 85741705, SERVO3_REVERSED, 0
PARM, 85741818, SERVO3_FUNCTION, 35 …where all the other motors channels have a mid point trim.
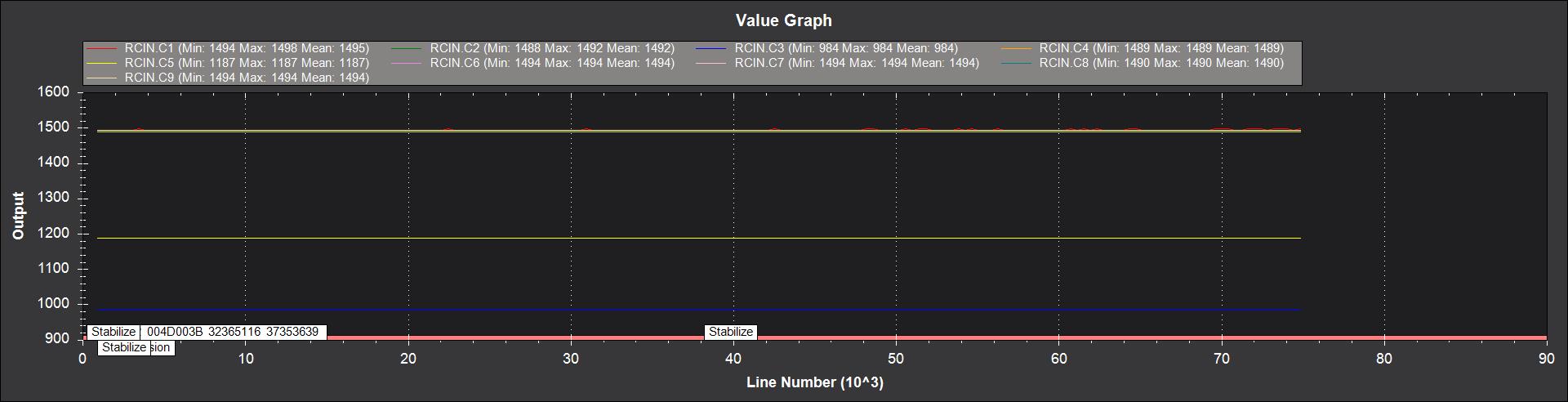
But no radio present.I’d be looking for a connection problem.This is a 9 channel flatline.
Also,there’s no record of an ESC calibration in the log so you must have done it manually.There is a tab for it in Mandatory Hardware now.I’d recalibrate everything.
Thank you. I’d recalibrate everything and let you know.
thank you, ciao