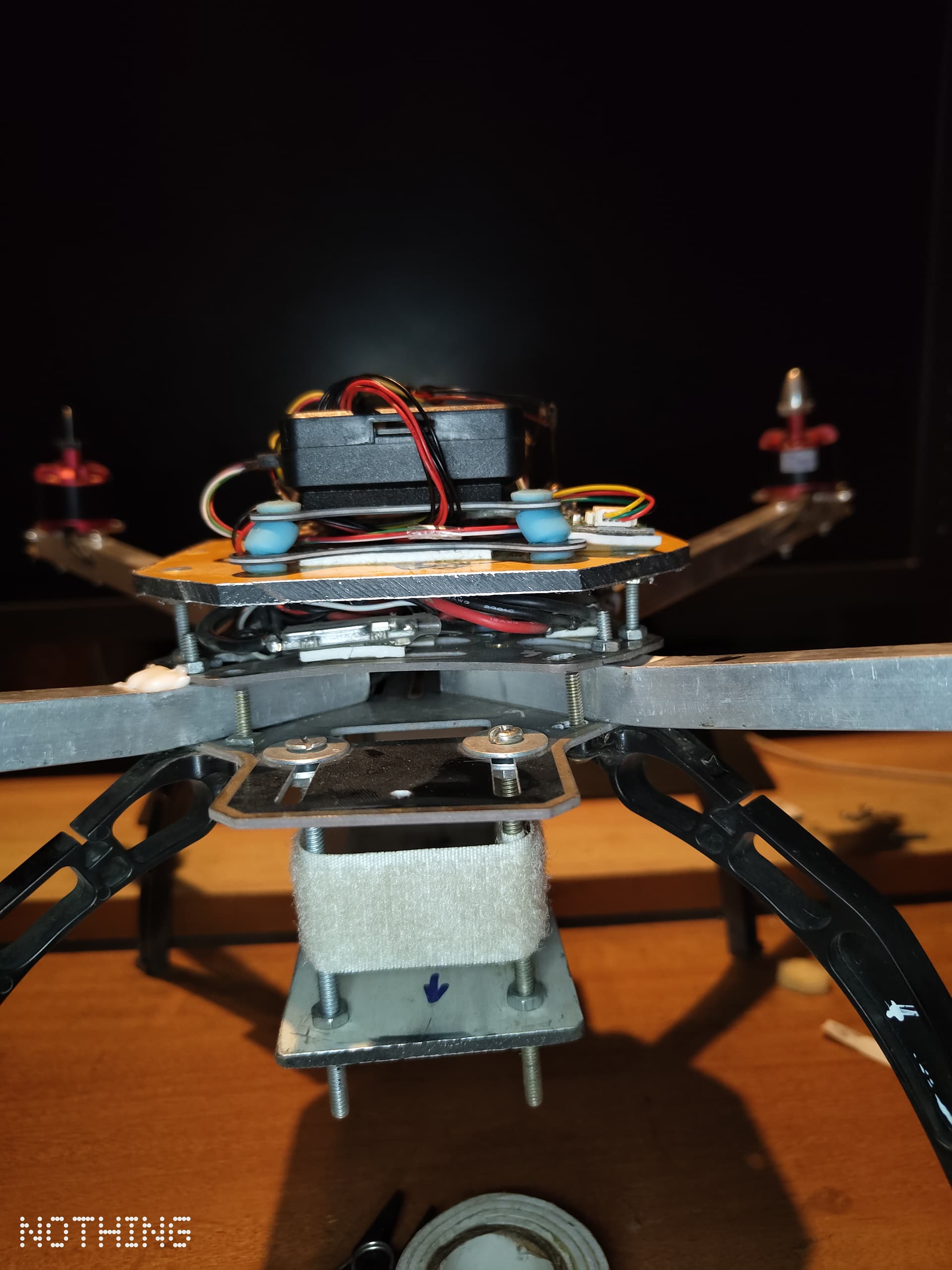
Foam tape is insufficient for this craft, you need something much more compliant like a ball mount. Even Zeal Gel would probably not work but you could try it.
Are those aluminum arms?
Foam tape is insufficient for this craft, you need something much more compliant like a ball mount. Even Zeal Gel would probably not work but you could try it.
Are those aluminum arms?
Yes almunium arm and base f450 frame
Extra battery and fc mount wooden plate
New shock absorber added
I feel your cables/modules above and surrounding the FCU are creating unnecessary vibrations. consider securing it down.
My 2cents…years ago we used a hex copter where clearance between props tips was 1" or less… it was horrible to land and would eratically move up and down as it neared ground…it is partially why i started building my own copters…my designs are all run through ecalcs…the x8 and quads are all ±18" square to motor center with 12 1/2 to 13 inch props… ecalcs flags a couple of these because they miss clearance by 1/2" or less… i.e. they all have 5" or more between prop tips…i have yet to see any of them have issues with ground effect… not sure the reasoning… or if this has an effect…but with the help of this community all 4 of my uavs are still flying with no major issue to date
today fly
fft test log
mask enable
https://drive.google.com/file/d/16ee4sTFBEDVMpjn6ISIJ1sVcEDHtAJxI/view?usp=sharing
mask enable
fft off harmonic off
look fft graph
https://drive.google.com/file/d/132MpV8w6diFzLYSve7xbHLhq1qKvSKeA/view?usp=sharing
I want to do a throttle based setup
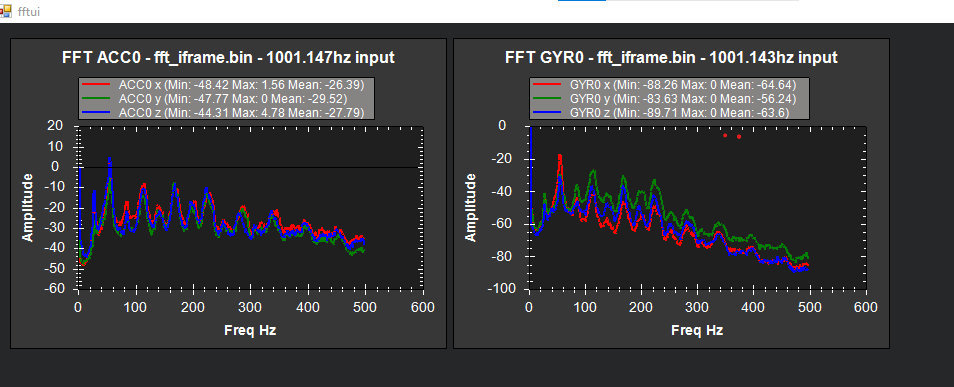
In “9fft hover.bin”
The in-flight FFT actually picked up on the base frequency quite well.
So if you wanted to use FFT you would set these:
INS_HNTCH_ENABLE,1
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE=4
INS_HNTCH_REF=1
INS_HNTCH_OPTS=2
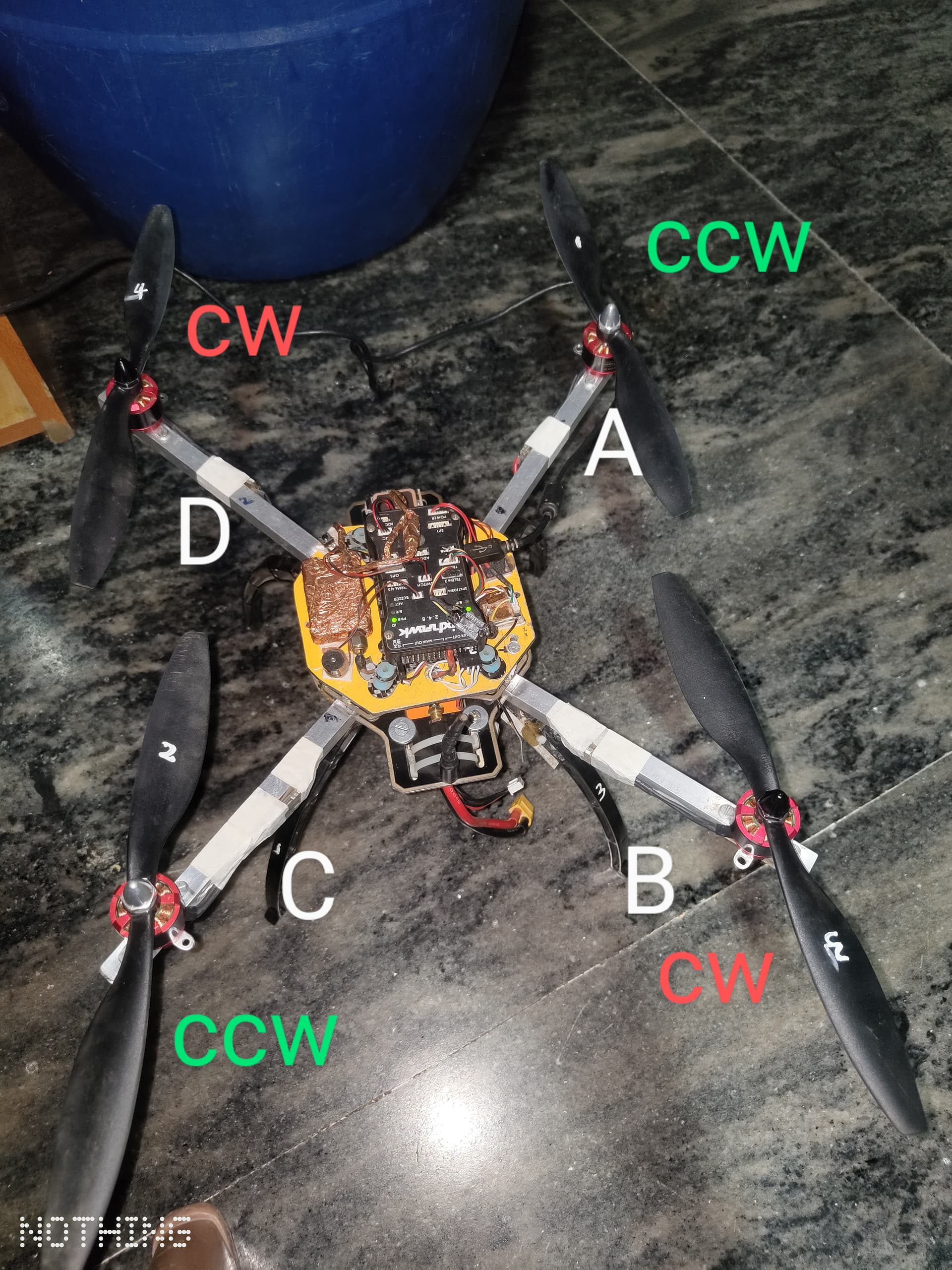
There is a bit of spread to the frequencies though because you have some sort of weight or yaw imbalance causing motors to run at all significantly different RPM. Best tp carefully check your motor alignment.
To use throttle-based notch you would
FFT_ENABLE,0
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.224
INS_HNTCH_FREQ,74
INS_HNTCH_BW,40
INS_HNTCH_FM_RAT,0.7
Looking at the second log “13 fft off”, the result is the same - you would use the same throttle-based HNOTCH settings.
The broad spread of frequencies is still there, so definitely look at the motor mounts and alignment.
If you can fix that you would be able to refine INS_HNTCH_FREQ and INS_HNTCH_BW
No matter which HNOTCH method you choose, set this in all cases
INS_ACCEL_FILTER,10
(I see you did this in the second log)
Today just observation fly
Using temporary pixhawk 1m bdshot firware and bluejay esc firmware esc rpm showing work
Ready2sky 2212 motor 1045 prop 3s lipo
all tested log
https://drive.google.com/file/d/1nC8ID388gul4w1hgr-bjt3kkiD2bus0p/view?usp=sharing
You can see rpm in mp
https://drive.google.com/file/d/10aKqJhwgK_1G2tsazFPwE-Gf24OTofBk/view?usp=sharing
i think pixhawk 1m bdshot throttle based notch on good result but 1mb firmware
When using the BDSHOT firmware you can set
INS_HNTCH_MODE,3
Now just go and run Autotune
On which valvu will autotune get good result AUTOTUNE_AGGR ?
Pixhawk 1m bdshot good for me but less features
Can i go custom firmware builders adding more
features in pixhawk 1m bdshot firmware ?
In features copter fw new update release So do I have to rebuild the firmware?
You can use 1M but it is not advisable.
Of course you can use custom firmware build server.
Yes, on every new FW release you need to use the custom firmware build server again.
Got below fft graph on my new Quadcopter with 26 inch prop.
Select the the linear scale option before you load the log file, then it will make a bit more sense.
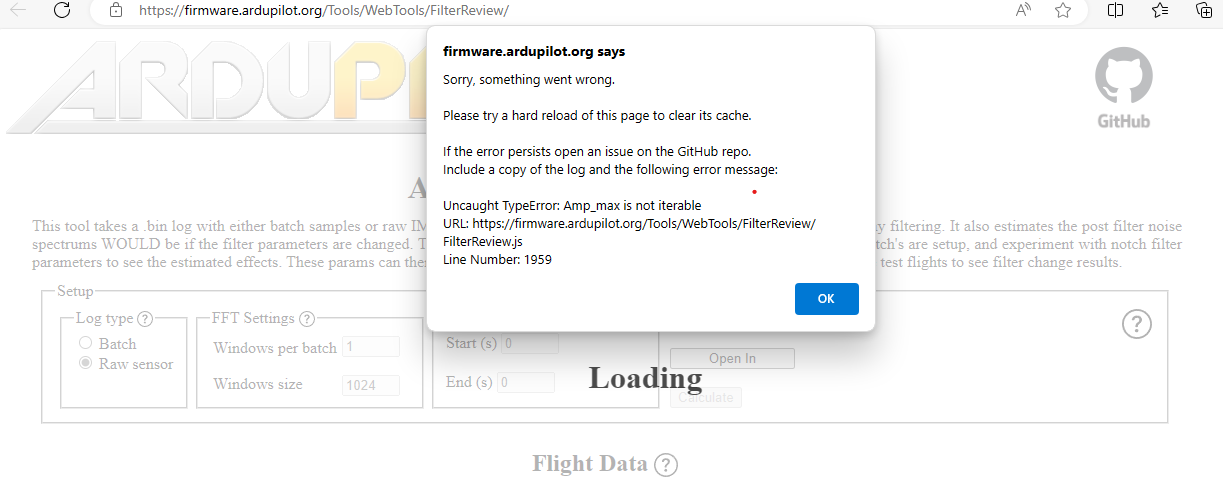
Or better still, use the new web-based tool:
26 inch props should have a noise peak around 35 Hz , approximately.
There must be something in your log it doesnt like. You will have to use the MissionPlanner FFT graphs for now, but ensure you have these settings for future flights
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
LOG_REPLAY,0
I have done that and started auto tuning my drone, the aggressiveness was 0.05. But it crashed.
Then again repaired it and trying to manually tune the craft.
@xfacta @dkemxr can you help me with this.
I am attaching a bin file with this link WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
Kindly help. It was almost again going to crash. Suggest something.
Update to the latest Stable firmware version (V4.4.4) . After doing so make sure EK3 is enabled and EK2 disabled. Then start over with tuning.
Your Firmware is just too old. 4.0.4 is 3 years old, the tool is only 7 months old. It should work fine with 4.4 and newer.
hi everyone.
Just saw the above log. Actually i am also having same problem.
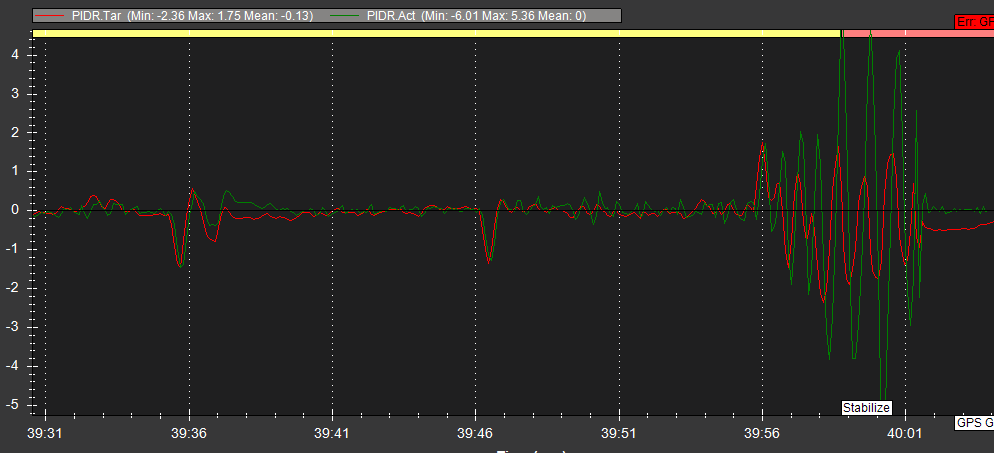
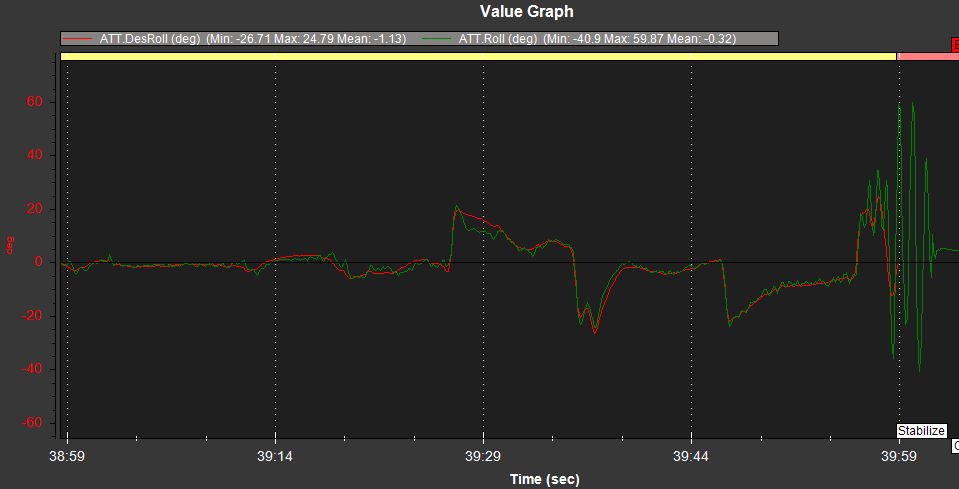
What is happening with me is my propellers are of 30 inch and it flow fine, but not with standing the winds and speed. If possible can you look into it. i am sharing few graphs for your reference.
@xfacta @dkemxr @tridge
Whenever i tried it in loiter speed of around 7-8m/s the same thing happens and lead to crash.
AmitSingh Have you find your solution.