Hi all,
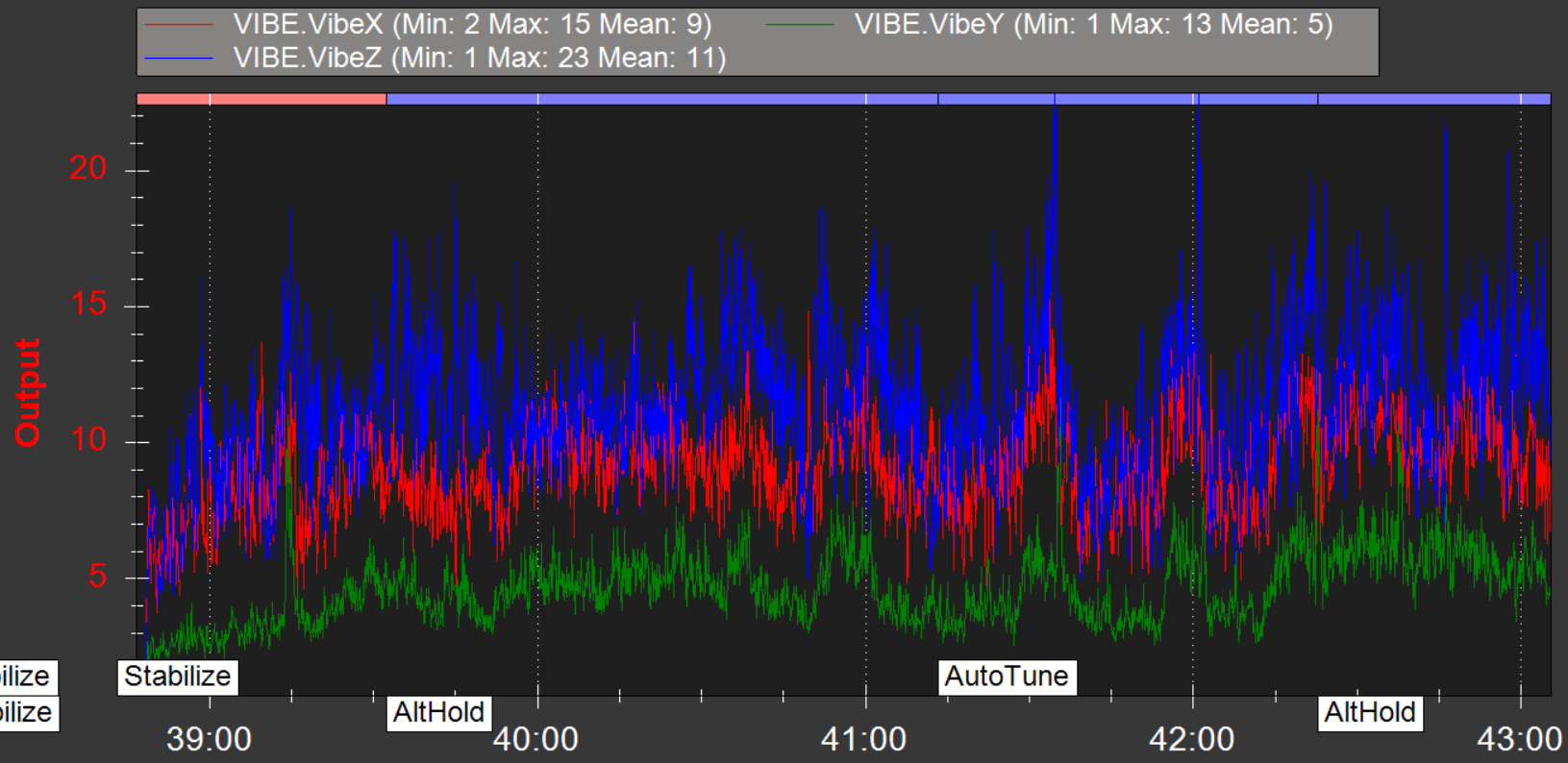
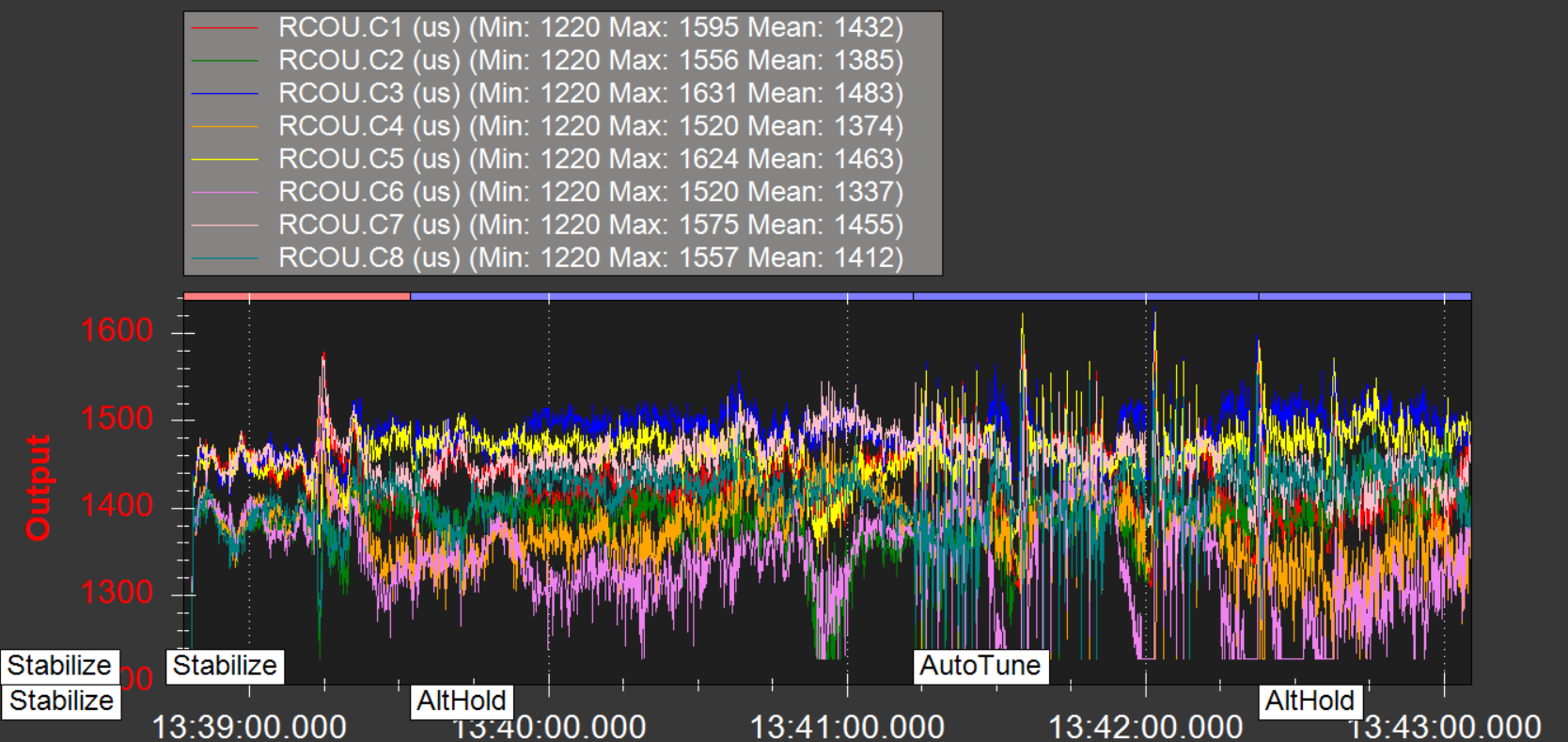
I’m trying to set up an 18kg X8 multicopter on Arducopter 4.0.3 and had some issues with handling during autotune. It didn’t seem too bad in stabilise or althold, so I proceeded to autotune.
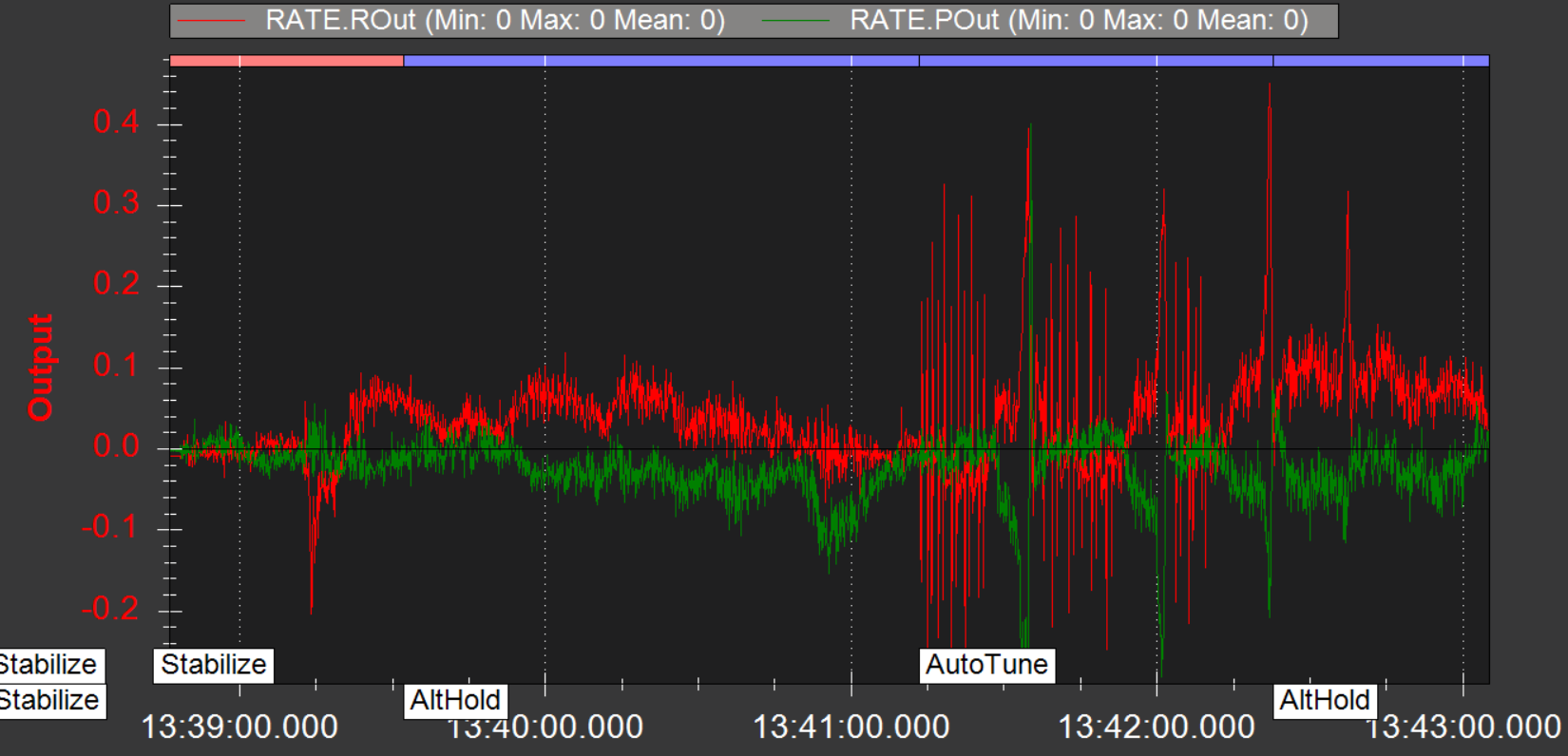
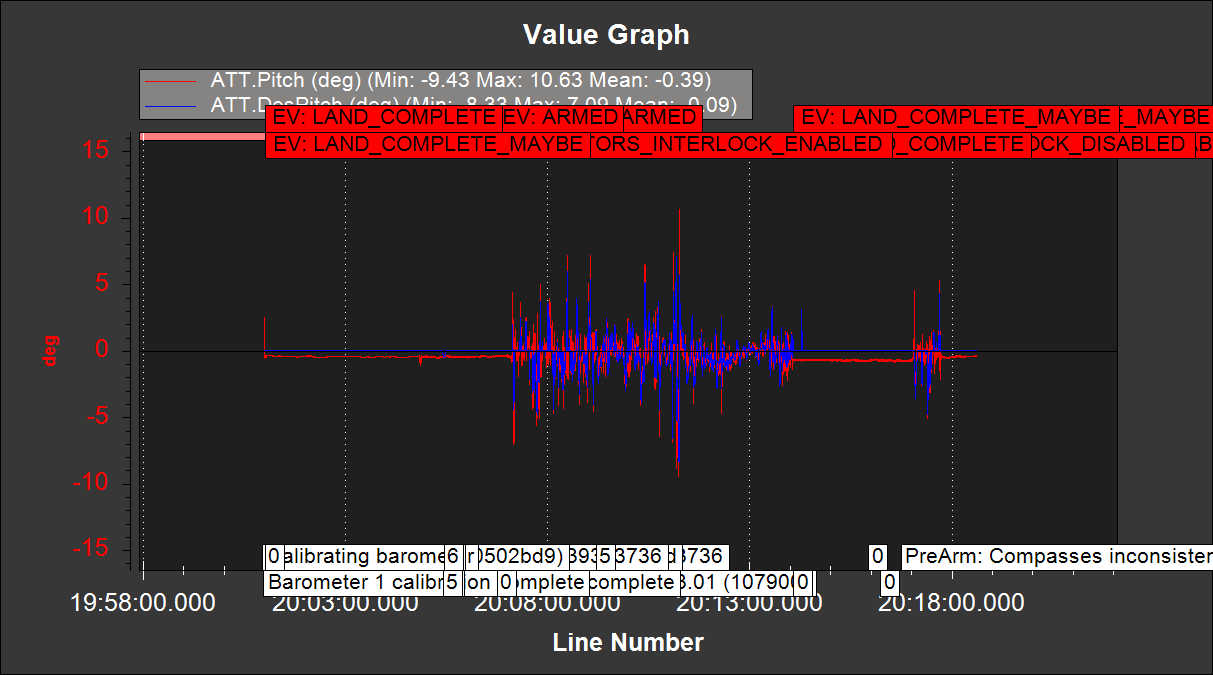
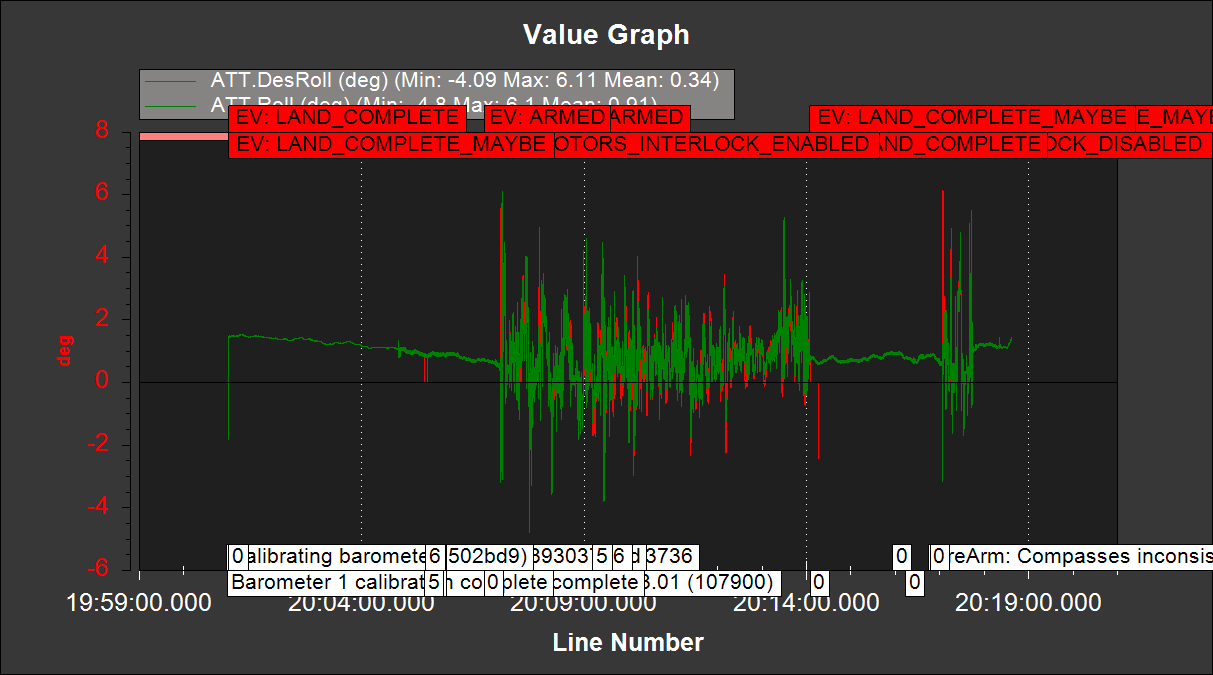
I have followed the instructions for initial setup for tuning carefully but I’m unable to complete autotune because correcting for wind drift is a bit sketchy - when returning the stick to centre, even fairly gradually, the copter overshoots significantly n both pitch and roll:

Strangely I got another significant overshoot after switching back to althold, which I hadn’t seen before starting autotune. I had understood that the original values should be re-applied when switching out of autotune?
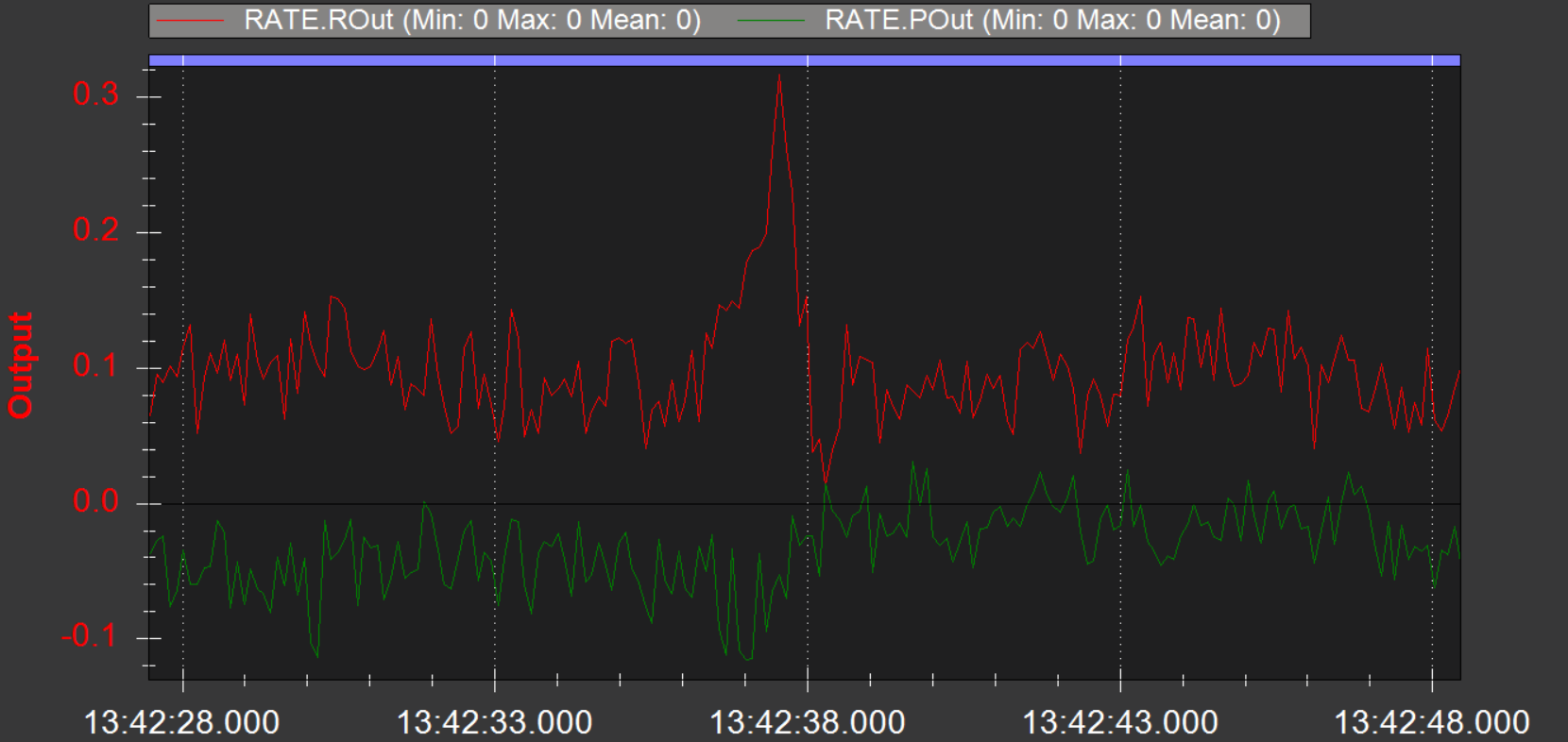
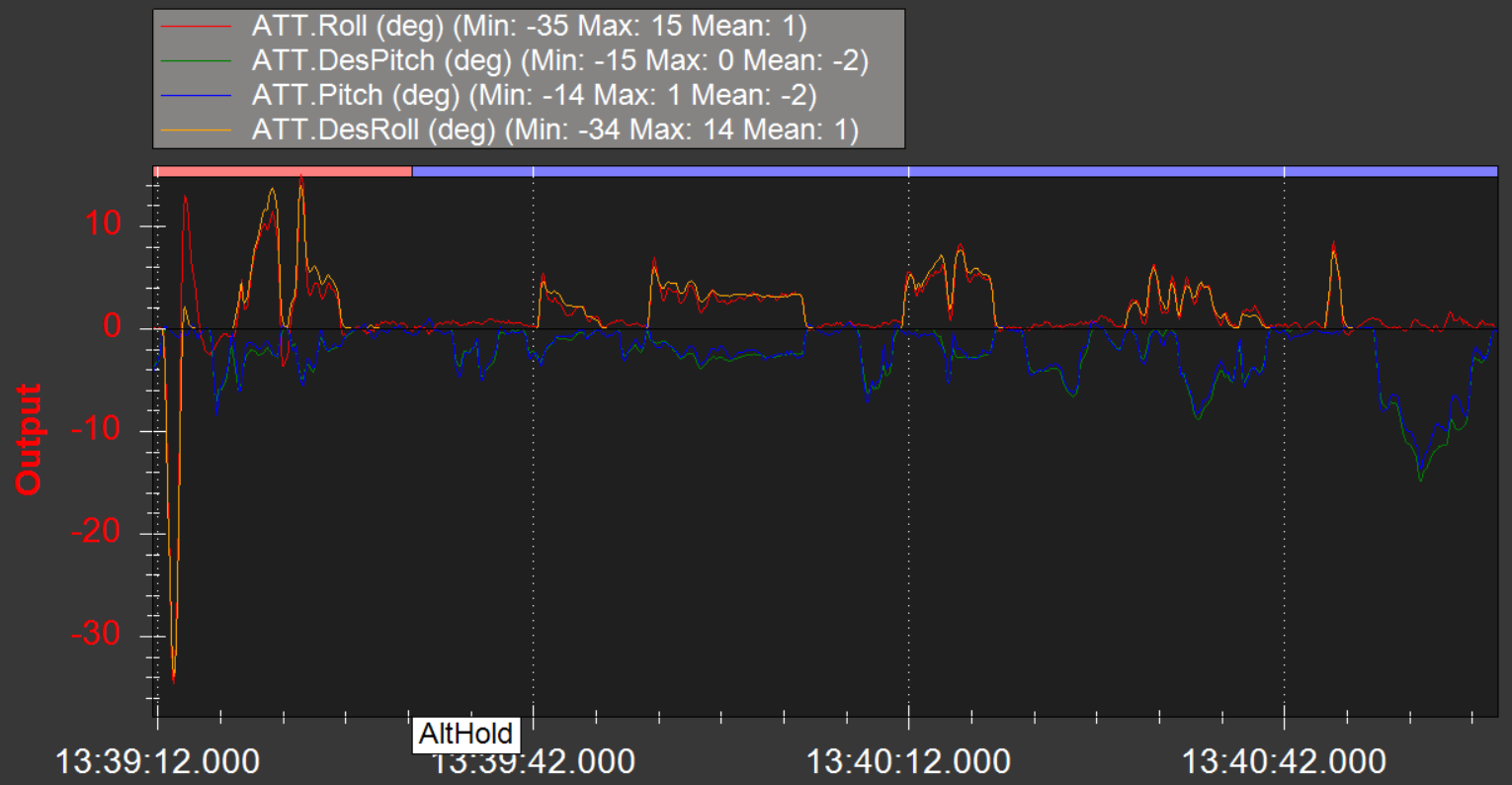
Here is a zoomed in view of the one that occurred in atlhold:
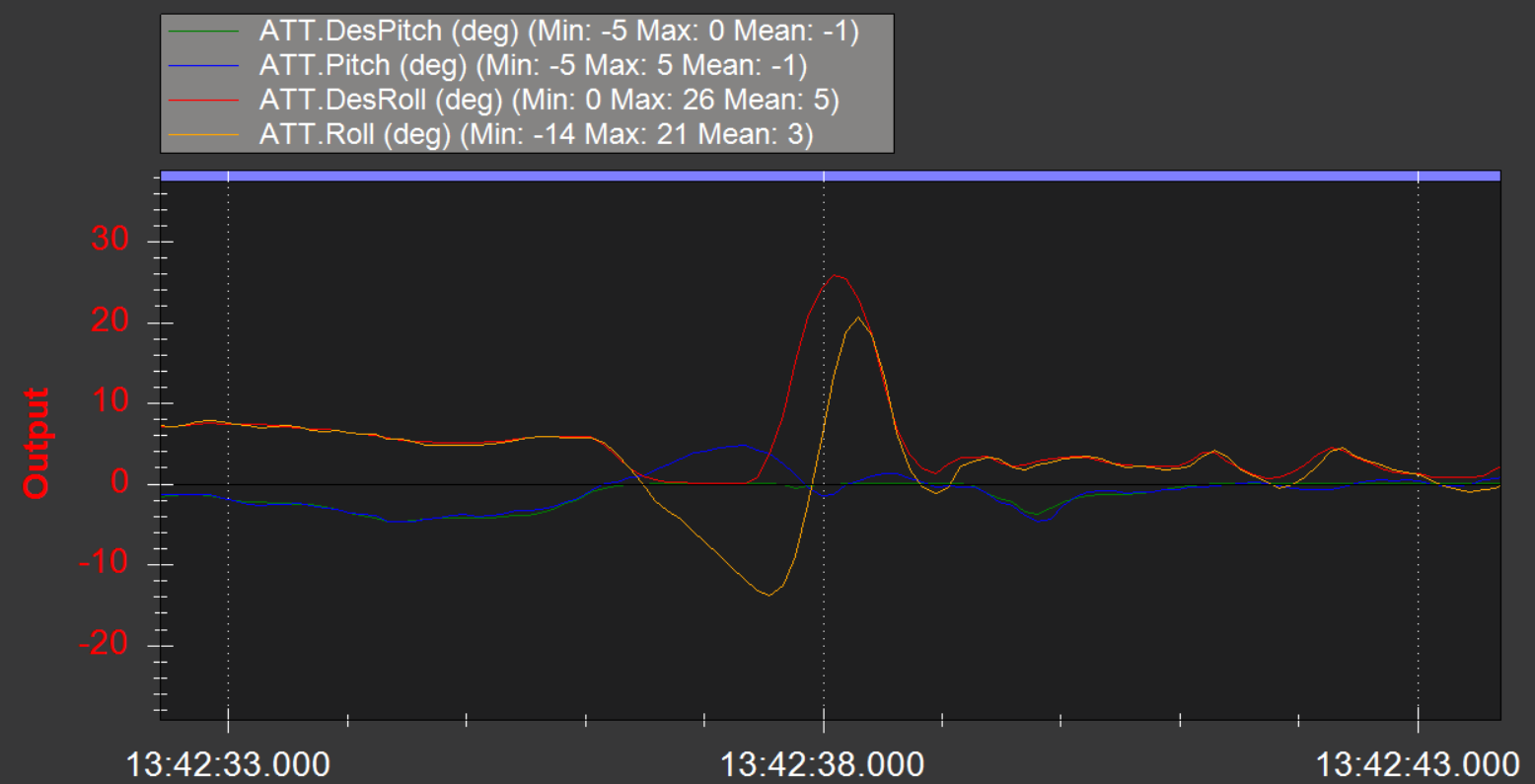
I’m unsure what manual steps I should take to improve the situation. I’m unsure if I should reduce the roll/pitch P gains, increase the roll/pitch D gains, or both. Current (and pre-flight) values (the defaults I believe) are
ATC_RAT_PIT_P,0.135
ATC_RAT_PIT_D,0.0036
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_D,0.0036
Autotune (aborted) appeared to make the ATUN.RD converge to 0.0053 and ATUN.RP was fluctuating around 0.09 within in a few steps.
Should I try these values?
Unfortunately I’m not permitted to post the log files - apologies, I know that’s frustrating and makes helping far more difficult. Happy to provide further info/screenshots though. I really appreciate any assistance.