I am having trouble getting my new tricopter to take off. When I throttle up for takeoff, the tricopter pitches back to such an extent that I need to move my pitch control stick all the way forward to stop it from flipping back.
I am using a Pixhawk 4 Mini running the stable PixhawkMini version of Copter from here: PH4-mini
I have completed the initial setup and calibration steps in mission planner with no errors.
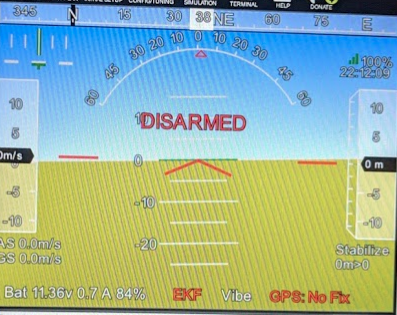
Here is a screenshot of the horizon from Mission Planner.
As you can see, it is reading (mostly) level.
How would I go about debugging this?
Let me know if you need any more info about my setup.
I do not understand what you mean by (mostly) level.
You want the props and the controller to be perfectly level AND plumb. You are going to need a carpenters bubble level for this
To get an accurate level measure, start with a thick flat piece of plywood or fiberboard.
Place the plywood on the ground and level it using a carpenters bubble level (both axis)
With props and spinners off, place your copter UPSIDE DOWN on the plywood so that the motor shafts are resting on the plywood
Using the carpenters level, span arm to arm of your copter and check for level. Rotate the copter 120 degrees and repeat 2 more times.
Plumb check:
With your copter still upside down, mark the location where each motor shaft touches the plywood with a sharpie.
Rotate the copter 120 degrees.
Verify that motor shafts are still over the marks.
Rotate the copter 120 degrees and verify marks again.
Having established your frame is now level.and motors are plumb,
Flip the copter back over into normal resting position to establish right side up leveling
Place the carpenters bubble level across 2 motor shafts . check for level
Repeat 2 more times with the other 2 shafts.
adjust so that all 3 shafts are now level with one another
Finally, place the carpenters level on top of your controller. Verify level in both axis
Now that you are sure everything is level AND plumb, Go into Mission Planner Optional hardware -> Motor test
Follow the documentation to determine motor order and the percent threshold to get motors spinning. Make sure all 3 motors start at the lowest percentage possible and that they are the correct motor!. If one fails to start, pre-spin it just before you run the test. If it spins up, then you have a mechanical issue. It may be simply fixed by running the problem motor for a while. If after warm up it starts by itself at lowest percentage then you should be all set.
If you perform all steps above and you still have an issue, then you will have to start looking at the logs.
After you arm with the stick, all 3 motors should be spinning with the throttle at idle. Your video did not show this. The Motor RPM must be the exact same for all 3 motors at idle.
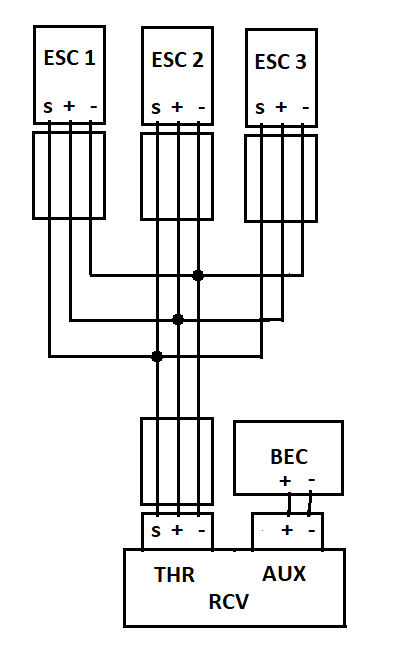
To isolate the issue, take the props off and put all 3 escs on a servo splitter wire that is plugged directly into your receiver throttle servo
You are not seeing Motor 4 rev up in the log (RCOU C4) you are seeing it being commanded, big difference, and based on your video it’s not responding. I would suspect the ESC or motor. Swap it with one of the others and see if the problem follows the motor/ESC. What motors and ESC’s are you using?