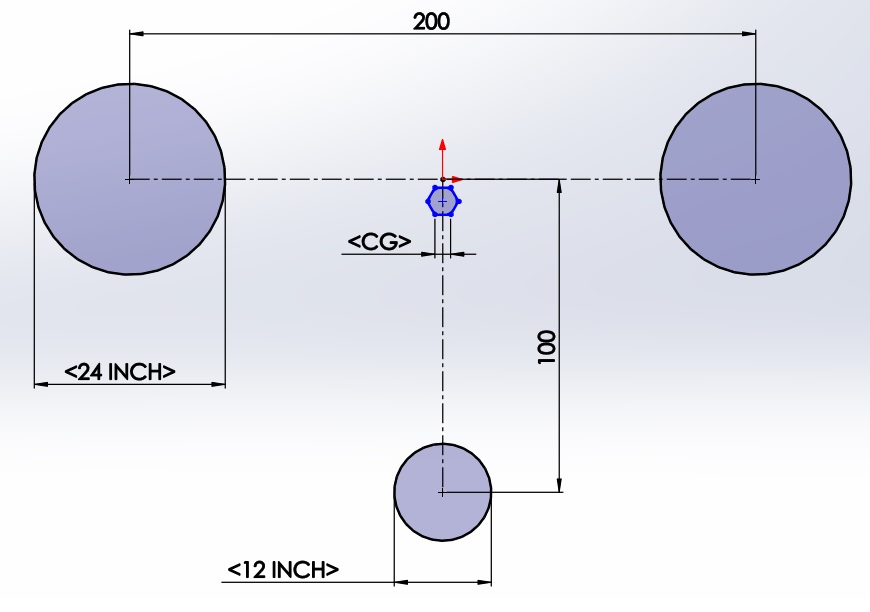
Hello everybody. I´m testing a tricopter concept with unequal sized props (24¨ front x2, 12¨ rear x1).
The idea is to emulate a bicopter (Osprey, Mil V-12, avidroneaerospace.com) but without swashplates, thus using a third rotor for pitch control.
I did not dare to lift it because of the large side slip & difficulties to remain level. I wonder if its normal or what I´m doing wrong. Soon I´ll fly it outdoors.
For this test I placed the CG centered, but I am concerned about moving it much forward, as I initially planed. I await your reviews, thanks for the material.
One thing is always the same, whatever the aircraft: close to the ground, nothing is the same.
You must (have balls) lift it to see if it is flying or not. Also, the ground effect will make your aircraft swing side to side, my tricopter does just the same but as soon as it is not dragging on the ground I have control of it. Also, you can cheat the yaw and push that yaw stick to correct on takeoff. Do not think that it should go straight up and not yaw at all on takeoff like we all do when we start. It will move strangely, the pids are not perfect whatever the situation.
Considering your situation, wait until you have some space outdoors, else you will just break props and motors.
Also concerning CG, I have found that tricopters are very pitch sensitive to it since only one prop can work the front back axis. In this way take your time to place your battery where it balances your CG. It will make a big difference for control.
In your video you can hardly see the rear rotor tilt. You could adjust the ATC_RAT_YAW parameters more sharply.
You have servo 7 and servo 9 on function 39 (tiltservo) with different min/max values. At the unused output set the ServoX_Function to 0 and check the Servo_min/max values .