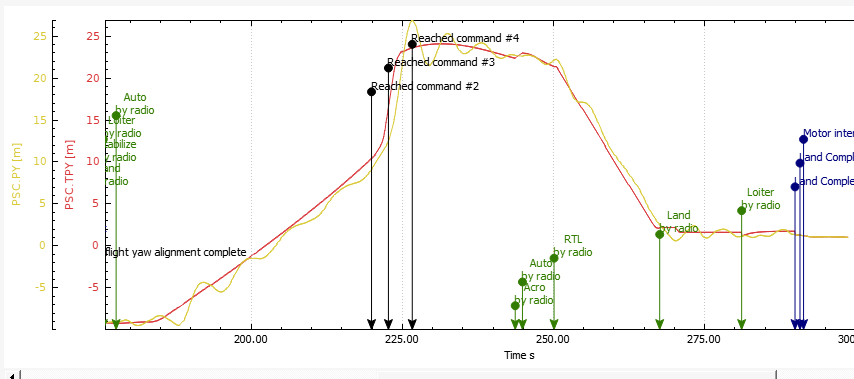
With that telemetry radio operating it’s back to the same deviations in the position controller. This is with the radio on.
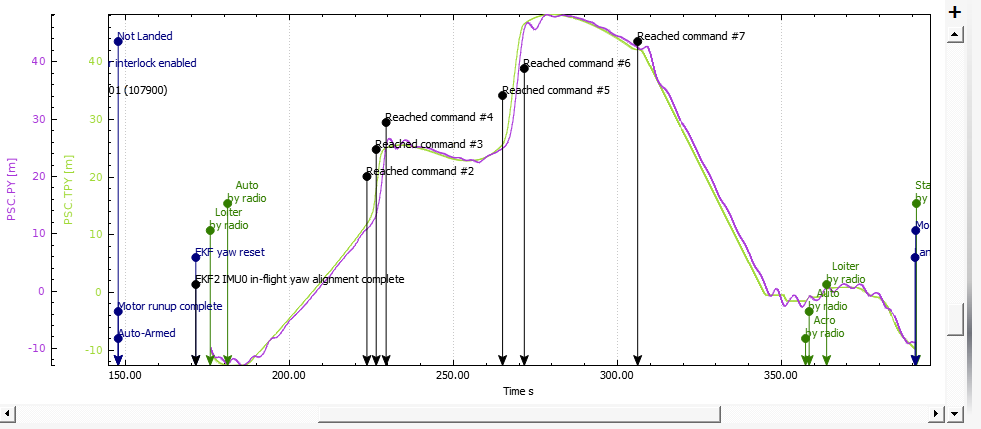
Despite the wind, this with the radio disconnected:
In the one without the radio I see the deviations during acceleration and deceleration, auto is not real smooth for helicopters under some situations. I have modified code for helicopters that will fix that but we’ll cover that later via private email.
You have a definite RFI problem with that telemetry radio. I don’t know what it’s affecting, looks like maybe the controller itself. But it’s not good.
What did you do different with the machine this time? Your vibe Y is lower than the vibe x, and they’re both mostly below 10. Did you hang some more batteries on it and change the CG?
That’s because the logging is in meters. 22 meters is 72 feet.
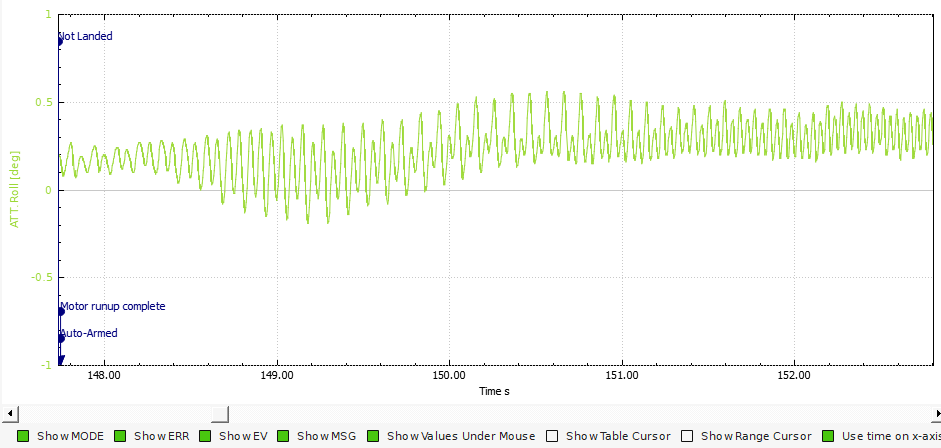
The helicopter is not tracking attitude in auto very good at all. It’s on both sides of where it should be and it’s bouncing back and forth. I think that servo1 is causing it.
So, get rid of that telemetry radio and put it someplace safe where it can’t cause problems. Take it completely off the machine. Didn’t you get a little CUAV PW-Link WiFi telemetry radio with the controller? Use that, plug it into the telemetry port, mount the antenna someplace underneath. It doesn’t have much range, but it’s good enough to make settings with your GCS and load flight plans and that stuff.
So when you fire up with that WiFi radio on there, your computer or tablet will detect a WiFi network that says something about CUAV whatever. The password to connect to it is “cuavwlink”. QGroundControl will automatically detect the UDP link and connect to it.
Servo1 is wiggling back and forth, but SERVO2 is also wiggling back and forth at the same time. The helicopter is shaking at rotor speed when you spool it up
This is a mechanical problem, either rotor out of balance or not tracking. Until you fix this problem the helicopter is not going to fly decent. There is no tuning that can fix it, because you can’t put lipstick on a pig and turn it into a beauty queen. You can put all the filters on it you want but the helicopter is still gonna shake, and anything you hang on it will shake. If you don’t want to shake test your payload, this needs to be addressed. THEN you can worry about tuning it.