The plan what to hang batteries on the landing gear for easier changes and more batteries. I didn’t know if I’d need 6 batteries for a 20 min flight. 2series 3 parallel. I hung the copter by a string centered on the main shaft. To see what the cg was. As long as it is all vertical weight and I’m not doing eratic flying couldn’t see the harm. Might make heli react slower but under the belly is gonna be the gimbal I am designing for my odd shaped sensor we spoke of before.
Me being a noon and everyone saying its gonna crash. And as the motor cycle saying goes it’s not if but when. So I put it in the battery hold to protect it. I ran all high voltage to the nose I nfrong of the motor to get away from rf. I put radios on the back and below to get distance from rf. Had to plan on the worst case because I had no clue how sensitive a these sensors were.
On another note. Iv had 3 close calls and 1 crash due to battery voltage telemetry. I know the yaapu has lots of neat features. I think the auto rotate rpm would be cool I bought an align hall effect sensor. But looks like I need to buy the gas suite to make it work. Also the last GPS coordinates for a crashed heli. But on a battery machine battery knowledge is king. If I can’t figure that out I’m going to have to get a Bluetooth ear bud to listen to the computer warnings since radio will be in my hand but way behind
I am certainly not well-versed in setting up this battery stuff, but is that what people use? I thought 3.85VPC at rest is storage voltage, and about 50% capacity for LiPo batteries?
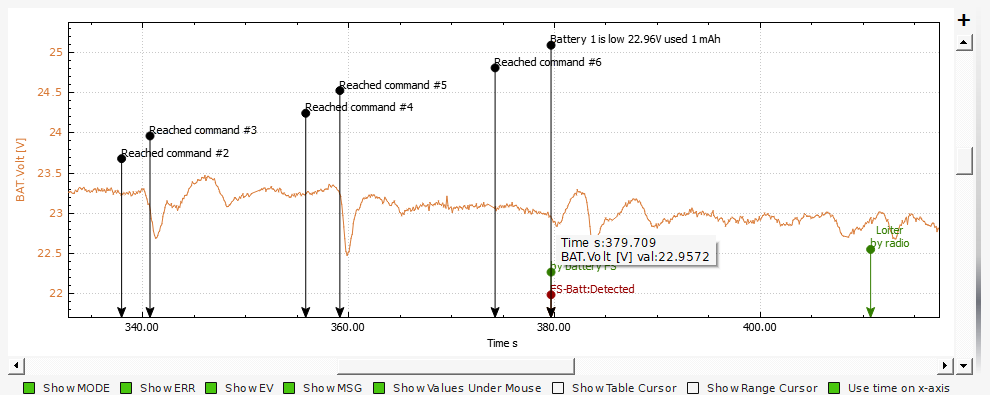
So when you shut down it looks like it immediately recovered to 23.5V, which is 3.91VPC, which is only very lightly discharged (I think). Are you sure you have this battery stuff set up right?
Seems to me back when I flew electric helicopters if they came in at 3.5 VPC after a flight and they had rested for awhile, I was not too concerned about it, and they seemed to last about 200 cycles. Although some of them would develop a bad cell after only 60-70 cycles and that’s what I didn’t like about the expense of flying electric aircraft.
I think I had the low battery cutoff at 3.0VPC in the ESC, which would be 18.0V for a 6-cell. If it got to 36 volts (12S power) then it would cut the power and start cycling it and had to autorotate the heli (although still under power). But even those recovered back to at least maybe 3.2VPC if I ran them to the limit. Which was not good for the battery, but I only did that a few times. I never set any failsafes on the battery because if it was still running and not home yet I would fly it and ruin the battery before I’d lose power and have to autorotate it.
Maybe somebody that knows more about these batteries can point you in the right direction on that. I only tried electric one year after I seized up my O.S. 105HZ nitro engine for the third time and didn’t have time to put another sleeve and piston it because I had flights to fly. So I bought a Trex 600 electric and flew that, it seemed to work pretty good. Then I bought a Synergy 626 electric and flew that for a year. The care and feeding of those batteries was more than I wanted to deal with. Nitro fuel was $35/gallon. $150 bucks a crack for piston, sleeve and bearings in the 105 and overhaul that every 50-60 hours. Carey Shurley developed the piston gas conversion for the Synergy 766, I’ve never looked back. Just dump gas in it and fly it 10 hours a day and it comes back for more. 411.7 hours on the first one and the engine has never been out of the frame since new. Only problem I’ve had with those is the fuel pump. I put the new stainless steel fuel pump diaphragm from Walbro in them, even that’s not a problem anymore.
So, unfortunately, I forgot most of what I learned about electrics. But I do know I ran the batteries a lot more aggressive than you are.
I have disabled the cut-off on the ESC on mines. I’d rather ruin the battery.
Lipos can be run down to 3.3v/cell. Hit 3.0v/cell and you start doing real damage. 3.8v/cell is ~50% full.
Jacob there is these new settings for sag compensated voltage, etc… I don’t know much about that, or how it works. Alan is not measuring current so I don’t think he can use that anyway. But doesn’t experience flying it, and then see what the battery recovers to after it rests, tell you what the voltage sag is under load anyway? Are those figures you gave under load? Or after the battery rests and recovers?
I cannot find how it calculates the sag?.
Sag will vary greatly depending on battery type and load.
I set up my failsafes based on under load values. If you go below 3.3v/cell, under load, you will wear down the cell quickly, below 3v/cell, you can kill it.
First few flights, I rarely use more than 50% of estimated usuable capacity. I then go home, look at the discharge curve, vs expected and then go 75% next flight.
As a general rule of thumb, I expect usable capacity to be ~80% of rated capacity. Some batteries, like the Multistars, you were lucky to get 50%, even if you stayed well under the batteries claimed C-rating. (The “cheaper” tattus weren’t much better).
You also have to anticipate that as voltage goes down, current goes up and the battery will discharge faster.
I now run li-ion, so my values are quite different, but as a starting rule for lipo, I would have 3.7v/cell as my first failsafe (RTL if you don’t trust the telemetry!). and 3.4v as Land.
Then adjust as needed.
Cool, thanks. That sounds about right. I probably over-worked my batteries when I flew electric because I remember when I hooked them to the charger if it said 3.5V on all the cells I was pretty happy. When a cell went bad I’d start finding one at 3.3, and as it got worse one day that battery would come with the cell at 2.9. And then the charger would refuse to charge it. So I “cheated” by setting the charger for lead-acid and boost that cell above 3, then switch to LiPo and it would charge it. Then I marked that battery as “bad” and used it for short flights.
I did NOT enjoy dealing with batteries. Some of these guys got elaborate balance boards and stuff to mass-charge batteries, and they’re running Honda generators at the RC field to charge their batteries. It’s like dude, just put the gas in the helicopter instead of the generator and get rid of all that
Well, as you know I’m leaning heavily that direction (Gas), however the li-ion pack has proven quite practical so far. I’m still running it conservatively, but I still gain more flight time than I did with a similar weight Lipo. It’s got an onboard BMS, that I can plug into a PC and check the heath and charging is just plugging it in and forget about it. (Well, you wont forget, as the fan on the charger sounds like a jet engine, but anyways).
However, due to the severe voltage sag, li-ion will be limited to low-to-medium power operations. S, perfect for surveys.
I’m not a fan of batteries but what I can afford to play with for now and crash! I looked into li- ion batteries cannot find a dealer in USA. I suppose I could make my own if i bought spot welding equipment. Iv been looking at 2170 batteries. From Tesla cars or Samsung. The more I have troubles, some of my own doing, and some cuz I don’t know enough yet. Buying a ready built and TUNED heli is looking like I might mortgage the house and get a heli that flies good so I know what that looks like lol.
Early in this thread I posted a log that had hard auto in the title. During that flight. Batteries reached 22.5 volts and dropped straight down below 18 volts. The heli looked sluggish. I had soft cut off on the ice 2. I was 50 ft up. I said here comes my first auto rotate. I dropped collective. I let it come down to 10 ft flared way to early. I watched the blades dam near stop and it dropped 8 ft. Good thing I just put my tall landing gear on cuz it bent and took the blow. So that the reason for the voltage Failsafe’s. When I went into the tree. Voltage was at 22.9 and I was trying to auto it in. Not what the ESC did that time. But heli blades were slow and unresponsive.
I have looked at Milwaukee batteries but voltages are to low for amps unless I could run 60 volt instead of 50 max charge.
We are buying cheap lipo’s. Floureon they seem to work but I don’t know anything about adjusting the kV on the motor for more efficiency or if running the ESC at 70 percent is efficient. We only pull 20 amp at 12 s and max I have seen is 30 amp. My idea was if I put a few more in parallel that will lower the amp draw per battery and be able to run them longer
The ESC’s are more efficient if you can run them at 90 or above. What many people do is adjust the voltage by running like 8S or 10S instead of 12S, then run higher throttle. I did do this with the 626. It was originally 12S but the motor and ESC got really hot. I dropped it to 10S and it ran much cooler, and less heat means better efficiency.
When I went to 10S I used a 5000 6S 45C in series with a 10000 4S MultiStar. Those MultiStars don’t have anywhere close to the capacity they claim they do unless they are discharged at like 5 amps. That combination actually worked and all 10 cells came in at about the same voltage after a flight with fully charged batteries.
I got close to an hour with that helicopter with 4 6S 5000’s at 12S with two stick packs in parallel. But it got really hot and the ESC burnt the paint on the canopy. So then I stuck a canopy on it with a hole in the front and a muffin fan on the ESC. But it still got hot.
It would only fly for a half hour on the 10S. So I bought it in on a survey flight to change batteries and then sent it back out to finish the flight.
I even tried 696 blades on it once. But those took more power than the 626 configuration and it wouldn’t fly as long and had poor tail authority. I lowered the throttle setting to run the bigger blades at 400 fps, same speed as the 626 blades at higher rpm. And then it was back to overheating the ESC again.
In the end I came to the conclusion that electric is great for 7-8 minute 3D flights for a lightweight, quite powerful machine in a short burst. And for 600 class and smaller where gas engines aren’t really all that practical because of their weight. I don’t remember exactly what the engine weighs, but I know it’s heavier than a couple 6S 5000’s and an electric motor. The upside with piston power is that it can produce full rated output continuous. Electric can’t because the batteries can’t take it. And energy density of the fuel + conversion efficiency to shaft power far outweighs the energy density of batteries at the conversion efficiency to shaft power with electric if the helicopter needs long legs and high continuous power output.
There’s likely a reason you don’t see electric Bell 47’s flying around with a bunch of LiPo’s in it. It’s not practical. And the bigger they get, the less practical it becomes.
I bought one of those too! Mine is a 300. It will fit in a 626 with a E7 tail boom and 696 blades with the help of custom water-jet cut aluminum frames, custom machined motor mount, and a custom-built clutch shaft.
I bought some new batteries for that helicopter and gave it to Kayla to use for a trainer. She said it only flies for 17-18 minutes and then it takes two hours to charge up the batteries. I told her I’ll fix that.
Alan might be interested in knowing that Trex 700 short flight times are also repairable:
We have been talking about that but I have never seen one for this old turd. The pictures on that link are for the 700N. The swash and head don’t look like mine. Don’t know if that matters. But heard I need some N parts if I want to use a straight E heli. Then again. I’m learning more every say about how to tune these wild machines. I have seen the 766 kits with gas frame conversions for 1400$ but knowing what parts cost blades and radios and motors and electronics unless I canabilize the trex. I’ll have 6 grand in one before I know it and still have to work months tuning it. Trying to still talk partners into splitting cost and buying one bulit.
1 hour flight time with 3 pound payload and gimbal to aim straight down at 20 kts is the goal. In the wind at 400 feet. Gas is the best bet. But will take a lot of weekend surveys to pay it off. The current drone hexa copter is not the ticket. But is working so far. As long as not much wind. Ground Speed below 14 mph. 4 battery changes a gen to charge battery’s. 5 sets of 6 lipo battery’s. And at least 4 hours on site min. But I am not currently flying it if I was I’d done bought a gas heli. That’s the reason for a trainer to prove concept. But struggling with this thing sets it back a bit.
If I can get 40 min out of this heli it will be a huge advantage over the hexa drone.
Well Alan, you have several things you can look at that have been suggested sources of problems, including that it looks like you are not working your battery hard enough. It appears you did get a successful auto flight out of it where it flew fairly decent. But still not 100% certain about what caused the first really bad one.
Still not sure why your RC telemetry is delayed.
Starting out with helicopters is very difficult. They are not beginner-friendly machines. But you are making some progress.
Edit: also wanted to mention something about your two somewhat rough autorotation landings. You cannot autorotate a helicopter with ArduPilot in anything but stabilize or acro. Any of the altitude modes - Alt Hold, Loiter, Pos Hold, Auto, will stall the main rotor. You might already be aware of this, but have your flight modes set up so one click of a switch gets you into one of those modes if it quits in flight. Stabilize is probably the best because after the flare you just have let the cyclic go and it will push the nose over and level the helicopter by itself and all you have to do is manage the collective.
If you try to autorotate it in any of the altitude modes you won’t have enough collective control to make it work.
Thanks to all the help from you and bill. I agree the flight look lots better. I got 4 battery’s mounted , wired up and charged. I’m going to try a flight with the radio hooked again. Then I am going to revisit the rat p d gains. Then on to the blade tracking. I also thanks to today’s conversation I’m looking into 4s battery’s. To try out 10s as an option. Iv exhausted the li-ion battery in my mind. Their is to much overhead when looking to gas in the future. New charger kicked butt. 4 batterys in 4 hours. 800% better.
Ya I had hopes the radio was causing the delay in telemetry. That or I had the wrong param set in the 4/5 serial port and that it was only getting some if the telemetry. Since the wiki settings did not work. I need to remember to see if artificial horizon is transmitting or if all telemetry is locked up.
Truly flying the heli in normal flying is fairly easy once you get your brain retrained to the orientation vs stick inputs. The mechanics and electronics take a bit longer. But I can say I learned a lot from the crash on how the heli operates.
I agree I have throttle hold on a switch I have memorized I have stabilize on a switch towards me and acro on a switch away from me. I start the heli in stabilize. One click gets loiter next click gets auto then rtl then land and all else fails final click is acro.
I saw that your serial settings have been set to 57 on all ports. Normally, at least SERIAL0 is 115200 because that is the USB. The others it won’t make much difference. The GPS driver sets the serial baud rate on the GPS port. But you are using SERIAL5 instead of SERIAL4 for your RC telemetry. I don’t THINK that makes a difference. On the V3x SERIAL4 and SERIAL5 are on the same plug. You would have to pull Rx/Tx wires out of the plug and switch them to the SERIAL4 pins (the two middle ones), then set SERIAL4 for the passthru instead of SERIAL5 (disable SERIAL5 by setting it to -1).
In the pinout diagram for the V3x they call SERIAL5 “GPS2” and SERIAL4 “Debug”. But most people use SERIAL4 for the passthru telemetry.
I don’t know if that will make a difference or not. But you could try it.
Will look at that this weekend see if it changes any thing. Heli ready to fly after work with gc radio. Not sure how I am going to do gains testing with no GC radio to adjust them. Might gave to try the variable switch again.