I need to replace a Black Cube on one of my drones and ask if there any traps if the parameter file from the old cube is loaded onto the new cube?
So far, I have I reinstalled the latest firmware and copied the parameters across and it looks to be OK? Other than checking everything I would expect an accelerometer, compass and radio calibration would need to be done? If it flies, then do an autotune.
Yup…that’s all you have to do. Calibration is all you need.
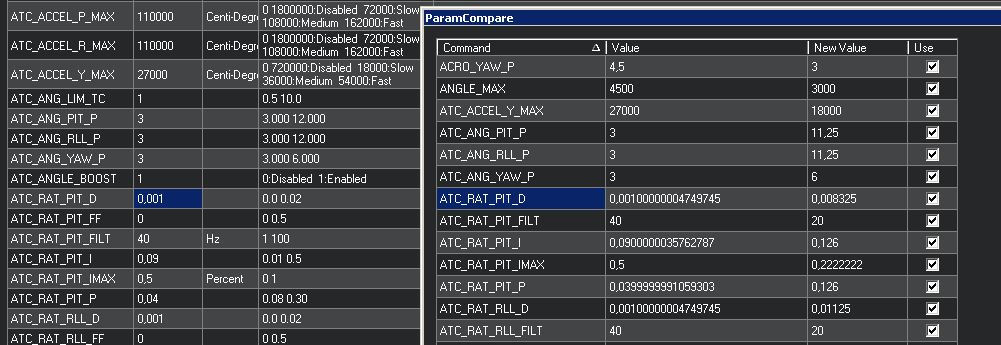
Once you are done doing calibration you can use Mission Planner and can compare your new parameter file with the old file. There is feature under Full parameter list to do that. Any differences will be highlighted.
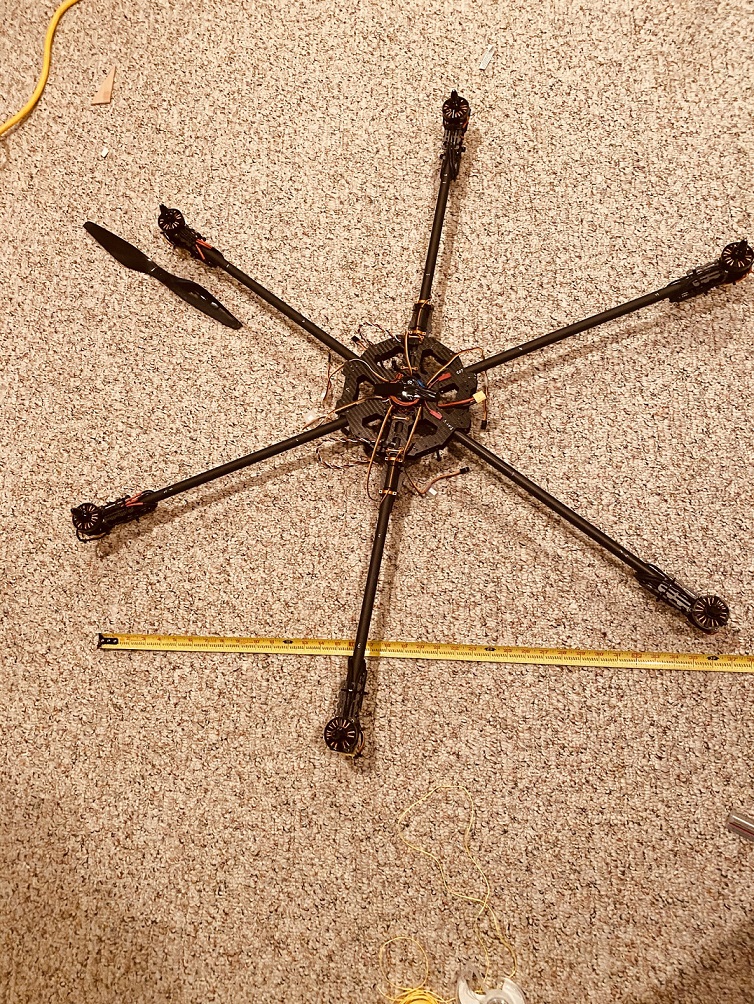
The ‘Beast’ looks a good solid build! I am planning a similar build but with some big props and low KV motors so I can improve the endurance and I already have some of those ESC’s in my bits box.
I’m ‘over’ trying jam everything into an ‘off the self’ frame so looking at designing a frame and getting a friend to cut it out with his CNC router. I need a battery quick swop system so still looking at that.
Where did you get those circular LEDs that were beneath the motors as they look great?
The Here I have is version 1 so a bit old.
Looks pretty good.
Tarot might be disappointed with you calling it a “Tarot ZD850” though since I think the ZD850 is one of those chinese made frame kits available from many shops within AliExpress and BangGood.
Some of them tend to call anything multirotor-related a “Tarot”.
It is definitely possible to do good builds with some of those non-Tarot frame kits though, as you’ve shown us.
I will post the pic of new design later today. Its a monster as I have extended the arms, and much bigger props.
as far as battery swap, if my lazy design engineer can finish my design I will bring to the market. Its a very unique battery swap solution… there are none available in the market at this point that you can buy off the shelf.
for motors there is no one like T-Motor. Burn the money but buy T-Motors…you will never regret!
That’s a monster! What motors are you using and how are you mounting all the electronics?
Thanks for the LED link and I will order a bunch of those.
Concerning battery mounts I have one of these which hopefully I can adapt to my Hex
Its a big bird. May be I can give my backyard Gopher a fun ride one day
I am using the same motors I had before inside the beast. T-Motor Anti Gravity MN4006 - 380KV. Each motor using dual 6S battery, using 15x5 prop, gives you 1258 Grams of Thrust at 60% throttle. so, 1258 x 6 = 7,548 grams of thrust without a problem which equals 7.5 KG overall lift capacity at @60% thrust. Later on I am going to put little bigger motors.
At 100% Throttle its 2609 x 6 = 15,654 grams = 16.6 Kg !!!
The mount you are showing is a just a carbon plate but not a bad design at all. I may buy one. You have to buy each piece individually???
I am designing a hot swapable battery compartment that can hold two batteries. You simply slide in the batteries and that’s it. has battery connectors etc.
The power system is based on Mauh Electronics dual battery system;
As far as Electronics and sensors, I have three tiers. One for power, one for sensors and one for Flight controller, GPS, ADS-B, Video (DJI Occusync), RFD9000X long range telemetry…
Hot battery swop looks a good system. The battery sliding system can be bought individually.
Looking forward to seeing the finished machine.
What HDMI to AV converter do you use?
HDMI…Another pain point in the industry… here is my take on it.
The long range proven system is for sure DJI Occusync. Picture perfect quality but it doesn’t support MAVLink. So i am talking with Ardu team developers and I may fund it to get it done for all of us.
Then you got all other VTX out there. All the same, shitty video quality after short distance. For short haul, 100’s of choices.
We are actually developing a HDMI system ourselves. I was partnering with a guy in Europe but he screwed up, so back to basically design board again.
Right now our primary focus is bring a unique Goggle design to the market. Hopefully a game changer.
" Herelink is an all-in-one solution for long- range HD video transmission, which can realize video, data transmission and radio control. The 2.4GHz radio controller with built-in screen which allows users to get long range HD video, data and control information, and the transmission range is up to 20km."
My reasoning is different. I like FPV style video. So DJI Goggles is a better fit for me.
I can record onboard as well inside the Goggles.
I can use the Goggles while flying.
I can connect an HDMI cable to a Monitor.
The only draw back is no full telemetry support yet. There is way around using an Arduino board to get more telemetry data inside the Goggle.
I think it will come down to personal choice.
Price wise I think both DJi Goggle plus Tx comes out to be the same. DJI might be a bit higher price.
mbuilds Yes, you need minimum tech ham radio license after X miles out in the US, else its considered illegal. Also Tx wattage has to be under x watts. For non line of sight flying need Part 104 license.