Personally I don’t like to use the AHRS trims to trim the heli, even though that’s the accepted way to do it. I like to leave the AHRS trim indicating true frame angle and use the hover roll trim and tweak the servo trims instead. If the AHRS trim is set to represent actual mainshaft vertical the hover roll trim takes care of roll drift. A few small tweaks to the elevator servo trim takes care of pitch (usually less than 5pwm).
Thanks for the tip. I didn’t realize this feature existed. I will have to try it out and then modify the wiki accordingly.
I recently used the new Tuning Guide to setup a TREX 700X, and I’ve got it flying extremely well, thanks again for everyone that helped get this updated!
My only question, and I can’t seem to find this anywhere, is there a way to specify the collective hover amount so that it will hover with the stick at the midpoint position? It currently hovers just above the midpoint, and I typically use position hold right after takeoff, then switch to Auto after that, and if I lower the collective to the midpoint in position hold mode (to keep it from climbing) before switching to Auto, it rapidly drops being its going to zero degrees pitch for a moment before adding collective to maintain altitude.
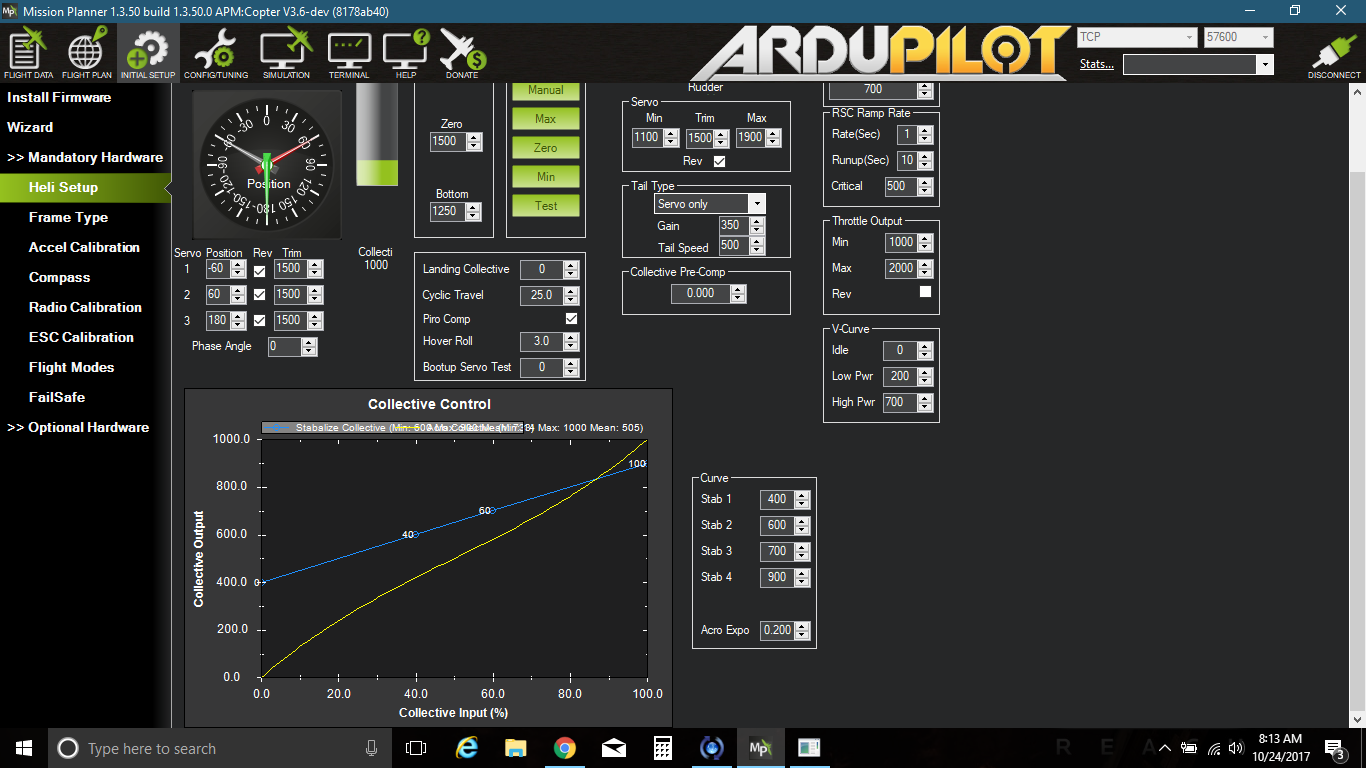
Actually, yes there is. And your question made me realize that we forgot to including tuning the IM_COL_STAB params. What these parameters do is form a four-point collective pitch curve in Stabilize flight mode. Your collective pitch range is set by the H_COL_MIN and H_COL_MAX params. Say it is -3 to +12 degrees.
The IM_STAB_COL’s 1 & 4 define your collective pitch range you want to use in Stabilize, i.e. if you set 1 to zero and 4 to 100 it will use the full collective pitch range in Stabilize. If you set them to 100 and 900 respectively, it will use 10% to 90% of the possible collective range for Stabilize.
Since autorotation practice is usually part of flying a helicopter I recommend to set IM_STAB_COL_1 to a value that gives you -2 to -3 degrees of collective pitch. When you start an auto you can then just move the collective to the bottom and add forward cyclic to get headspeed up and establish your autorotation speed. Then feather the blades by moving the collective up a tiny amount and drive the main rotor with the cyclic until you’re ready for the flare. Or if you’re under the “dead man’s curve” you can simply use the collective to drive the main rotor in the descent without having to hunt for the ~-3 degrees you need to drive the rotor. This part is totally optional, it is just what I use for autorotations.
IM_STAB_COL’s 2 & 3 define the mid-stick collective, with 2 being approximately 40% stick position, and 3 being approximately 60% stick position.
So if your helicopter likes to to hover at 60% collective, then set IM_STAB_COL_2 to 500 and IM_STAB_COL_3 to 700. Or if you want the collective pitch curve to be a bit flatter at mid-stick, then set them to 550 and 650 respectively.
Also, in Mission Planner, there is a box at the bottom of the “Heli Setup” tab that allows you to set it up.You use Stab 1…Stab 4 boxes to input the values Chris was telling you about (if you’re more of a visual guy).
Ok thanks Chris, that’s exactly what I need, I wasn’t sure how to adjust this correctly, and I know H_COL_MID needs to stay at zero degrees pitch.
Just so you know. H_COL_MID doesn’t need to stay at zero deg pitch. I think that is necessary if you are using the collective to yaw mixing but I don’t use that feature. So, I set H_COL_MID to my hover pitch 4-5 deg. The other thing to remember is that the IM_STAB_COL values set your Stabilize mode collective. When you go to Acro (if you use acro) then you will get the full collective range given by H_COL_MIN and H_COL_MAX. So unless you plan on doing acrobatics where you need excessive amounts of negative pitch, I set my H_COL_MIN and H_COL_MAX similar to what Chris recommended.
Ok thanks Bill, that’s good to know, I’m not using the collective to yaw mixing, so that would be easiest to just set the H_COL_MID to hover collective.
This is strictly a survey machine, so will never use Acro mode, and I already have H_COL_MIN and H_COL_MAX set to the recommended range, so no problems there.
I guess I do have another question, when flying surveys in Auto, when its climbing for the initial waypoint at either 200 or 400FT, the climb rate is extremely slow, about 1m/s, and its only using hovering collective, and it tends to pitch up at about 15 degrees every 4 or 5 seconds, then levels off, not sure what’s causing that. What parameters do I need to adjust to increase the climb rate and get a smoother, more consistent ascent?
I do see the WP_NAV parameters have several related to climb rates for Auto mode, but want to be very careful adjusting these.
I think a log will help here. Make sure that the PIDA field is also logged.
Hey FANTASTIC WORK!!!
Sorry I have been away for a while, the last few months have been completly crazy!!!
I am so happy this is all going so well!!!
I am hoping to get some more work on the Attitude controllers done to address some of those heli related issues.
Made my night, thanks and chat soon!!
1 Like
I have been going through the new tuning guide and need some clarification on a minor point.
ATC_RAT_PIT_FILT 20 on some post a value of 10 or 12 been suggested what difference will this have during the setup.
In relation to mission planner i have noticed some errors.
mission planner it uses TUNE instead of tuning
where can I find maximum I value is in the PIDP message
Thanks
David Ardis
David,
Thanks for your feedback.
So the FILT parameters are the low pass filter cutoff frequency. So these parameters help remove noise (due to the sensor or vibrations from the heli) from the signal being fed to the rate controller. So they can have an impact on the tuning of the rate controller. This primarily helps with tuning the P and D gains as they are most sensitive to noise. If you can’t raise your P or D gains much because you get aircraft oscillations then you might consider using the FILT parameters to filter out the noise. You would see this oscillation or noise in the rate.R or rate.P signals as you are trying to tune the VFF. Try setting the FILT param for the corresponding axis to 10 or maybe 5 (but no lower than 5). This could help you get higher values of P and D gains which help the controller fight disturbances. If you change the FILT params, then you should zero your P and D gains and retune them with the new FILT value. This is more advanced tuning. I would only suggest getting into this if you are not getting desired results from the method provided in the wiki.
Sorry. That is a mistake in the tuning wiki. The parameters should read TUNE and not TUNING. We will need to correct that.
Not sure I understand what you are asking.
Regards,
Bill
Bill
In the WiKI article Setting the I gain, IMAX, and ILMI you say Pull the log and look at what the maximum I value is in the PIDP message. I cant find the PIDP message in my logs.
Thanks
David
Ah, ok so you have to set your LOG_BITMASK to have it log the PID messages. Use 397310 for that parameter. That should give you the PID messages in the log.