I’ve been tasked with finding why a vehicle has crashed. The only piece of information I have is the TLog as the vehicle is unrecoverable. The pilot and spotter described the vehicle as simply ballistically dropping out of the sky while moving at speed, no tumbling, nothing out of the ordinary.
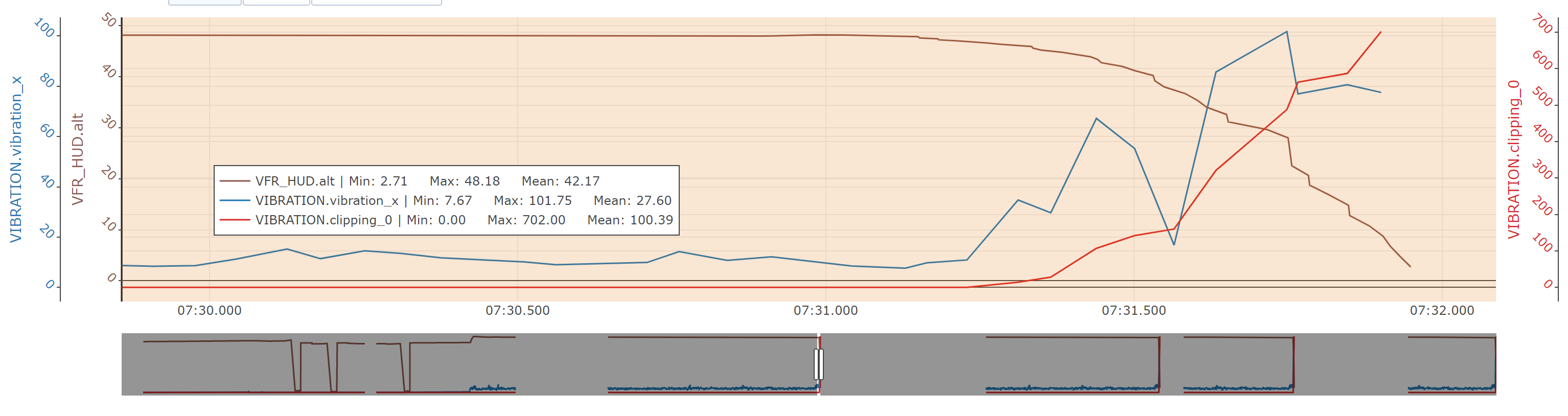
I’ve been looking up and down the TLOG file but havent seen anything that sticks out. The only thing is that the estimator shows high vibrations and loss in positional accuracy. Logs show the vehicle tumbling, but also show vibrations/clippings while the vehicle is “tumbling” as well. Is the vehicle attitude trustworthy if vibrations are clipping?
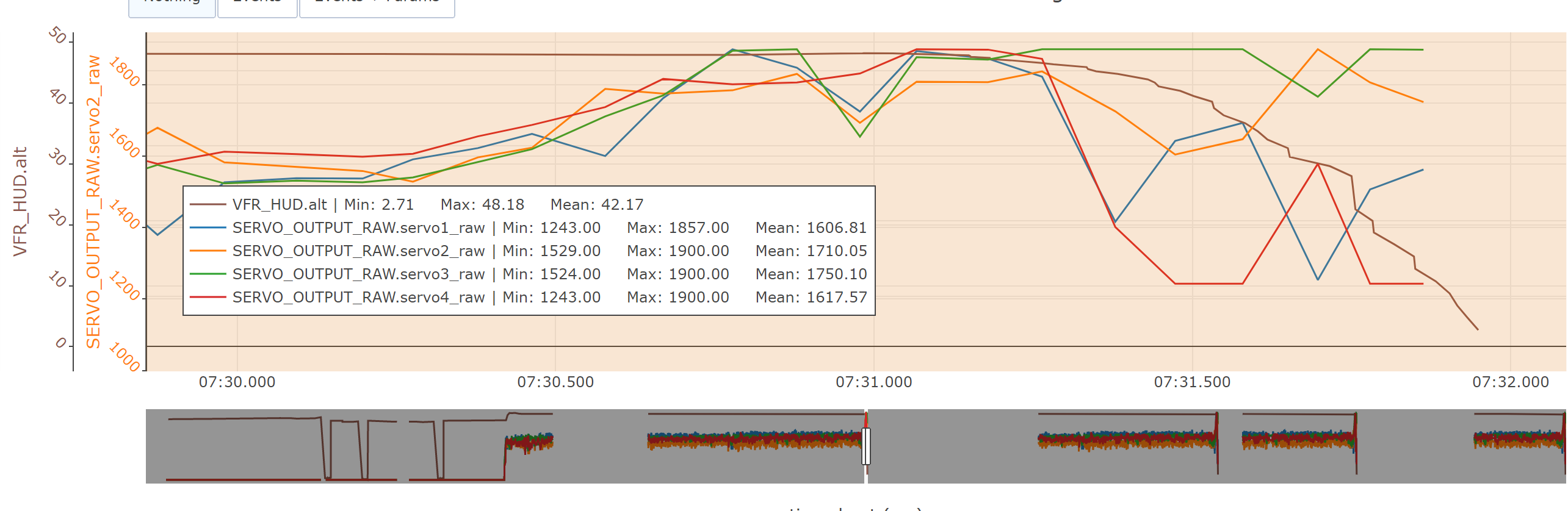
Nothing else looks out of the ordinary apart from one of the motors saturating. no massive battery sag either. can anybody draw any conclusions here? What else should i be looking at?
I am not in a position to analyze your data at the moment, but a saturated motor is often indicative of a motor failure (thrust is needed from that side, yet none is produced, so the output signal drives to max as the autopilot attempts to use the now dead motor).
I would agree with you, but this motor has saturated on other flights in similar conditions, which is just full tilt returning home. The battery has sagged a similar amount as well in those flights. The only difference is that for some reason the same vehicle experienced a massive amount of vibrations, to where it was clipping.
It looks like there was 3 flights in the log, and all look almost identical in terms of motor outputs, clipping, vibrations, stability. All is very poor during descent.
I would almost say a crash was inevitable when motors are going to maximum, oscillating and saturating during descents.
Since motor outputs are relatively normal during the rest of the flights (except each descent) I would say the problem is tuning. And figuring out why vibrations are so high during descents…
Actually I cant see how the last flight, at the end of the log, is much different to the previous ones.
Even a .bin log from previous flights would help to diagnose the problem.
I wonder if an existing imbalance (prop imbalance, motor angle/blade tip interference, bad harmonics, etc) is exacerbated by propwash effects during descent? Motors routinely saturating should NOT be the norm, and it can certainly be the cause of a crash when a vehicle is already on the verge of instability. What were the descent rates?
thats another question i’m trying to answer. The other “flights” seem to be direct copies of this flight i have highlighted. The flight in question is also supposed to be 15 minutes long, but the log only shows 3-5 minutes in length.
log file seems to be corrupted somehow. I assumed somehow instead of leaving dropped packages as blanks, the log file smushed the entire flight together. no idea though. uneducated guess. this is a tlog file generated on a Siyi Mk15 transmitter.
yeah agreed. passed along some advice to the pilots to lower some parameters to solve that issue. definitely think it could’ve contributed or exasberated a problem, but i don’t think it was the main cause of it. I personally think a prop blade bolt, or arm joiner bolt came loose mid flight, but there’s no way to confirm as the drones currently in the ocean somewhere.
That seems a likely cause.
If they are doing commercial operations, or anything non-hobby, then they should be keeping the .bin logs somewhere. It would be nice to the most recent one.