Of course you can use the films in the announcement.
We can write a buildlog (Walter) and a first draft (me) of a wikipage proposal and send it to you for proofreading and further improvements. But unfortunately it will takes some time. You will have released 3.8 sooner.
Some settings:
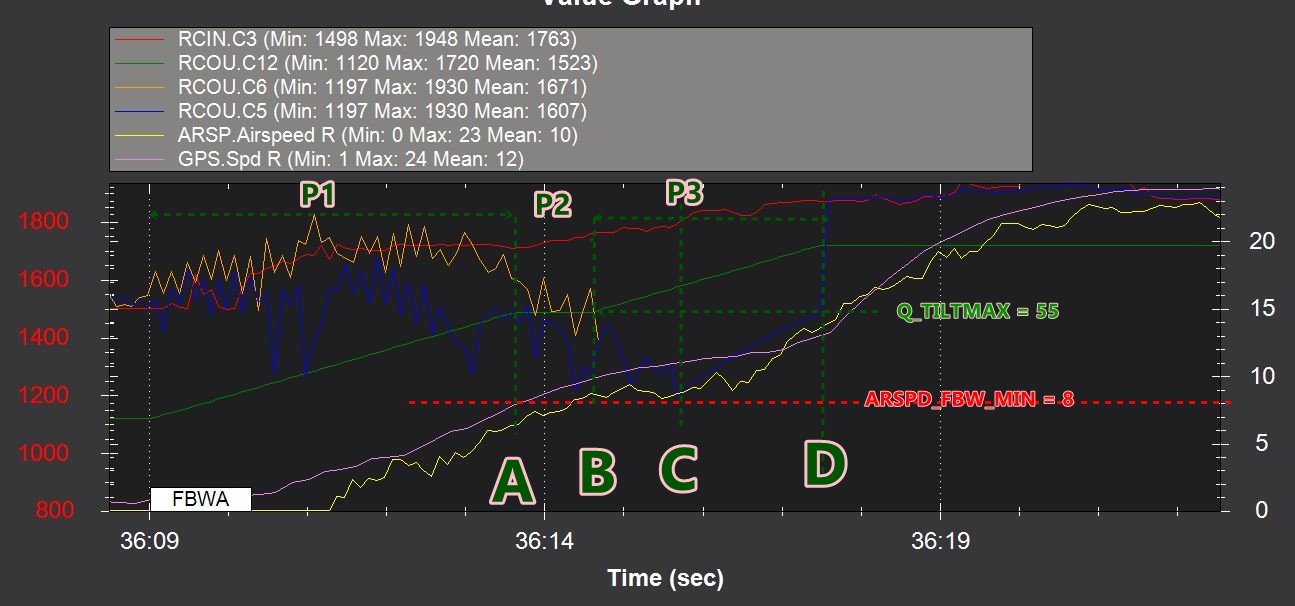
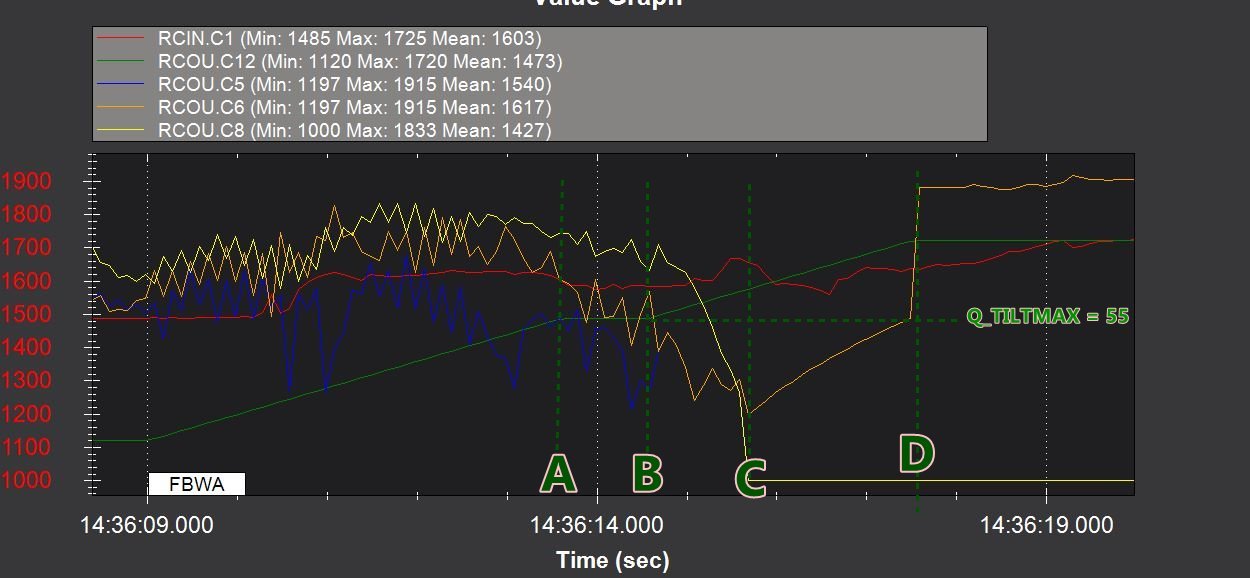
RCOU.C5/C6 front right/left motor
RCOU.C8 rear motor
RCOU.C12 tilt servo front motors
RCIN.C1 = ailron stick input
RCIN.C3 = throttle stick input
After switching from QHOVER to FBWA, the tilt servo runs up to 55 degrees (Q_TILTMAX 55, point A in time). The program then waits until the Airspeed has reached the value of ARSPD_FBW_MIN (8, point B in time). Until then, the forwardtransition runs perfectly without losing even a millimeter of height. But between points B and D in time follow three seconds of shock stasis, in which the rear engine is switched off from C but one can still not adjust full throttle.
In this context, some questions:
What is the meaning of Q_TRANSITION_MS (1000) at tiltrotor with normal servo (time between point B and C ?)
Is full tilting really triggered by Airspeed or by GPS-Speed (Groundspeed)?
Could it be selected, wether triggered by GPS or Airspeed?
Could not a separate new parameter be used for the limit speed instead of ARSPD_FBW_MIN?
Could you set a third speed parameter for the tilt servo that allows between B to C to bring the rotors to the final position more quickly ?
Hi @Rolf,
I had a look at the log, and I think I see what the issue is. Once we get past the transition time the throttle is constrained to rise at the same rate that the tilt increases.
The simplest fix is to increase the Q_TRANSITION_MS so that the rear motor stays active for longer, and the tilt has a chance to get further forward before it shuts down the rear motor.
We can also look at changing the strategy it uses.
It the the time after we reach the transition airspeed before it shuts down the VTOL control. During this period the VTOL throttle is slowly lowered. That lowering makes sense for non-tilt quadplanes, but I think its counter-productive for tilt-quadplanes. I’ll think about whether it should be disabled.
airspeed, but if an airspeed sensor isn’t available then it estimates airspeed using ground speed and the wind estimate.
I think it doesn’t really make sense to use groundspeed if airspeed is available
we could, but I don’t think that will really help solve the issue
yes, we could if that turns out to be the best approach
Cheers, Tridge
Thanks for looking through. Walter and my opinion is also to use a third parameter for the tiltservospeed after reaching ARSPD_FBW_MIN would be the best approach.
I looked at this again today, and decided that instead of a new parameter that it would be best to just make it always use a minimum of 90 degrees/second for that stage of the tilt. I’ve created a PR here:
The reasoning is that once we’ve shutdown pitch stability control by shutting off the rear motor that we want the motor tilt to be all the way forward as quickly as we can. The 90 dps limit is the same as we use for the transition to manual mode, and is only there to be nice to the tilt servo so it doesn’t try to move too quickly.
Do you want me to create a prebuilt fw for you with this change?
Cheers, Tridge
@ tridge:
Excellent solution. We can’t flight until thursday due to bad weather(forecast). If so far the changes will be in master, we can also download it.
Rolf
As the first phase of development for a tiltrotor tricopter plane we’re making, I’m currently building a tilt-rotor tricopter on a T frame, with the two tilting forward motors mounted on the top of the T, and a larger fixed rear motor and prop mounted on the bottom of the T frame. In order to test this version of the code without wings, I’m wondering what would be the best setup to ensure that the rear hover motor remains on to produce lift at all times, and if that is at all possible fly that at the moment?
The difference being that when this version of aircraft flies forwards it will not get any lift from wings (as there are none yet and I would only like to use the smallest highest aspect ration wings possible to sustain cruise) and the rear motor must maintain some rotation to produce enough lift from the rotor both when it is stationary in hover and whilst it is moving forwards (including for pitch control).
Currently with tilt rotor support as Rolf is using in the above video, I’m assuming the only motor that would be activated by going under Q_Assist_Speed would be the fixed mounted tail rotor? The forward tilt motors would need to be rotated upwards to maintain lift whilst slowing down. However, as would be the case for the tiltrotor tricopter explained above with the forward motors tilted for forward thrust, I would need the rear motor to stay on even in forward flight, and also to maintain pitch control even without wings. Is this currently possible with arduplane and if so what would parameter setup could possibly work?
without wings, why not just using arducopter with a pass-through rc-channel for manuel tilting the front rotors ?
In STABILIZE oder ALHOLD it should stabilize attitude as long as you do not exceed the tiltwinkel. In POSHOLD while hovering it should lower the rear motor a little bit ? Exciting.
I think I might have missed something whilst reading this long thread since last time I posted here.
Does your aircraft use differential front motor winkel for yaw control, or do you still use an extra rear rotor with tilt servo for yaw control in hover?
I was thinking (maybe hoping?) you were using differential tilt to control hover yaw, as that is what I need to do.
Eventually I’d like to add wings, however, to get there will require a functional control system with differential yaw in hover, which we’re trying to develop on a tilt-tricopter separate from the wing components. The reason for this is it’s possible the wings could become “optional” ie the same vehicle could fly with and without wings.
There’s a couple of things we’re trying to “hybridize” into the design. Things like optimizing forward prop pitch on the tilt motors whilst optimizing and increasing the size of the static tail rotor for hover, to the point that some 70-80% of lift comes from the rear rotor in hover. Then there’s some expected gyrocopter effects in transition between hover and forward cruise that we want to take advantage of as well. All whilst reducing the required wing area to the absolute minimum to sustain forward flight in cruise. (and by only using 3 motors and two servo’s all together to do so, for both hover and forward flight)
I really like your progress so far, and have been meaning to post here again for some time. I might have to give your idea a go using Arducopter…wouldn’t be the first time I’ve used that to go forwards without pitching it forwards. It actually was part of my first attempt at quadplanes in 2014, where I used a small hexacopter with a pusher prop on the rear. It hovered with about 14A, but flew forwards at +90kmh on 18A using the pusher prop because the hover props autorotated in flight and produced lift. Was fun, like driving an airborne hovercraft in alt hold, to turn you’d yaw and throttle up until you got the desired rate of turn…no banking required.
I’m working on changes to avoid the need for that, so we control yaw in hover by differential tilt of the front motors. That is needed for the eflite convergence, but also makes sense for any tilt-tri-quadplane as it saves you a servo output and makes the rear motor mount simpler.
The only real downside is you need to be able to go past vertical on the tilt of the motors, or you will tend to drift forward in hover.
Cheers, Tridge
Can Arducopter be configured for a reverse Y6 such as two motors on the front of the aircraft and the other four to the rear. If so, how would that be configured? Thanks for all your effort!
I was hoping you were going to say that! That would be great!
Can you also have a look at my previous post further above addressed to you regarding setup and keeping the rear hover motor continuously on whilst tilting the other two forwards? Thx.
@Tridge
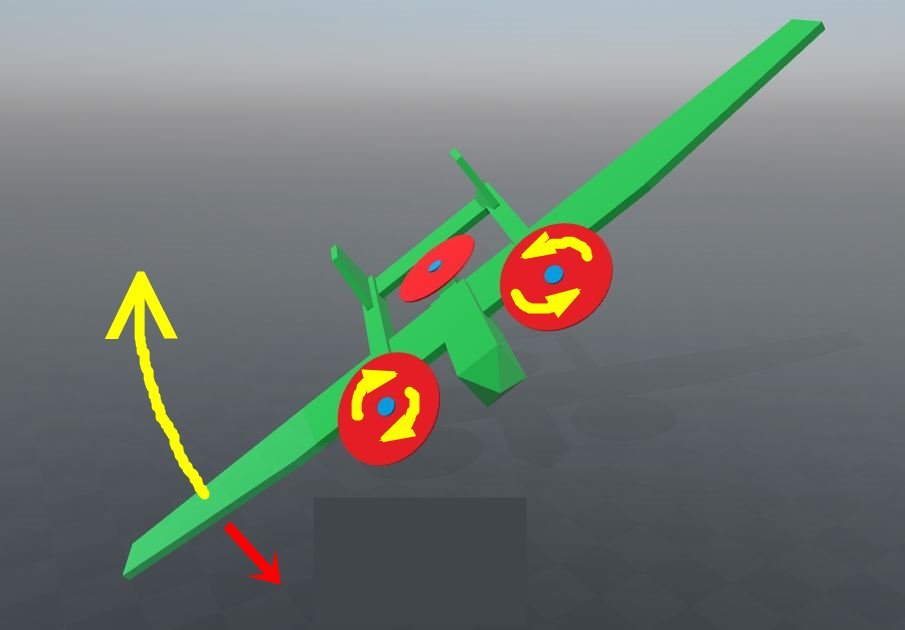
Clockwise from which point of view ? The pictures of copter-wiki suggests from above. If cw/ccw means cw/ccw seen from above we have this situation:
Increasing power on front right motor leads to roll-feedback in direction of the red arrow - the wrong way round ? In this case we have to change the front motor direction
We will probably design a new tilt mechanism for vectored yaw… So we can fly without the rear tiltservo.
.
Today we was happy with your improvements of the forwardtransition: Perfect- thanks a lot
Roughly how much rearwards tilt angle do you need from vertical on the tiltrotors for effective yaw control? From the video yaw control authority looks really good.
Is it possible to fly in reverse in hover?
If I have a tiltrotor tricopter without any wings; how do I make the rear hover motor remain on throughout the flight, even in forward flight, and is there currently a way to limit the tilt motor forward angle, so it produces a minimum in hover lift?
(Note our intention is to have wings eventually, but we’d like to configure the copter etc first and experiment how much wing is required to maintain forward cruise winged flight)
I don’t know if this will work at all, but you could try setting the SERVOn_MIN/MAX values to prevent the motors moving all the way forward, and then set Q_TILT_MAX=90 and set Q_ASSIST_SPEED=100.
I haven’t tried it though.