Hi,
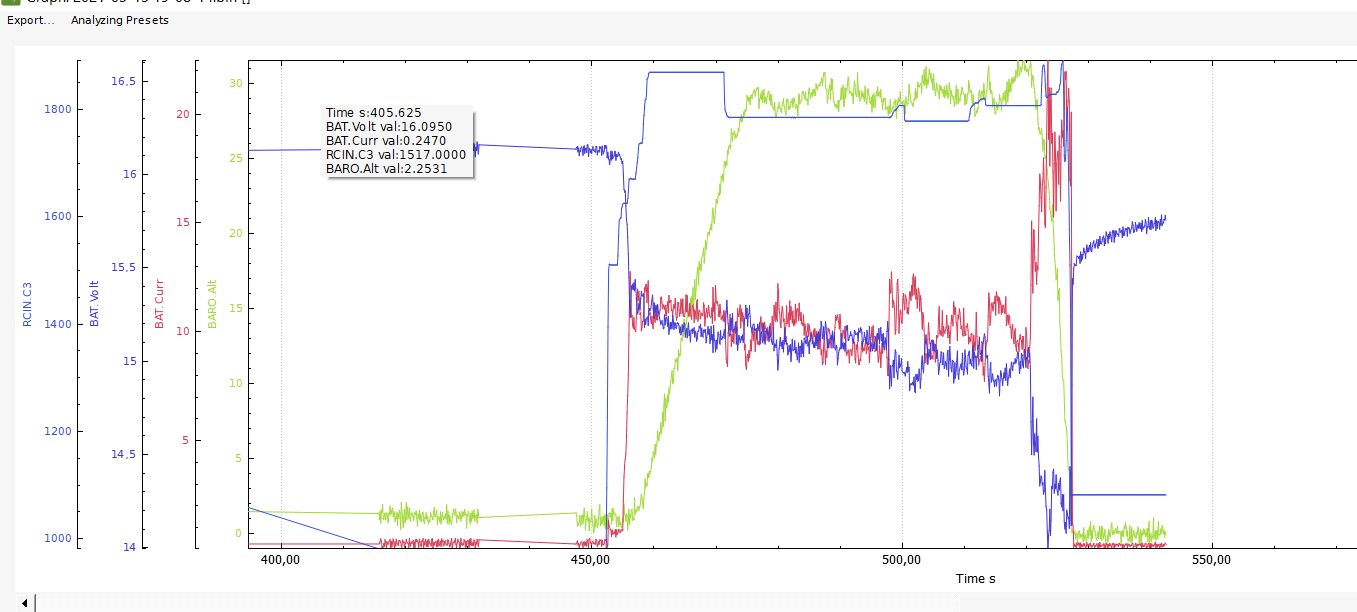
Today, during a regular test flight got a sudden thrust loss and soft’ish crash… Analyzing logs and cannot understand what is going wrong. I found a quite strange behavior of the motor (actually I heard in field right before a crash).
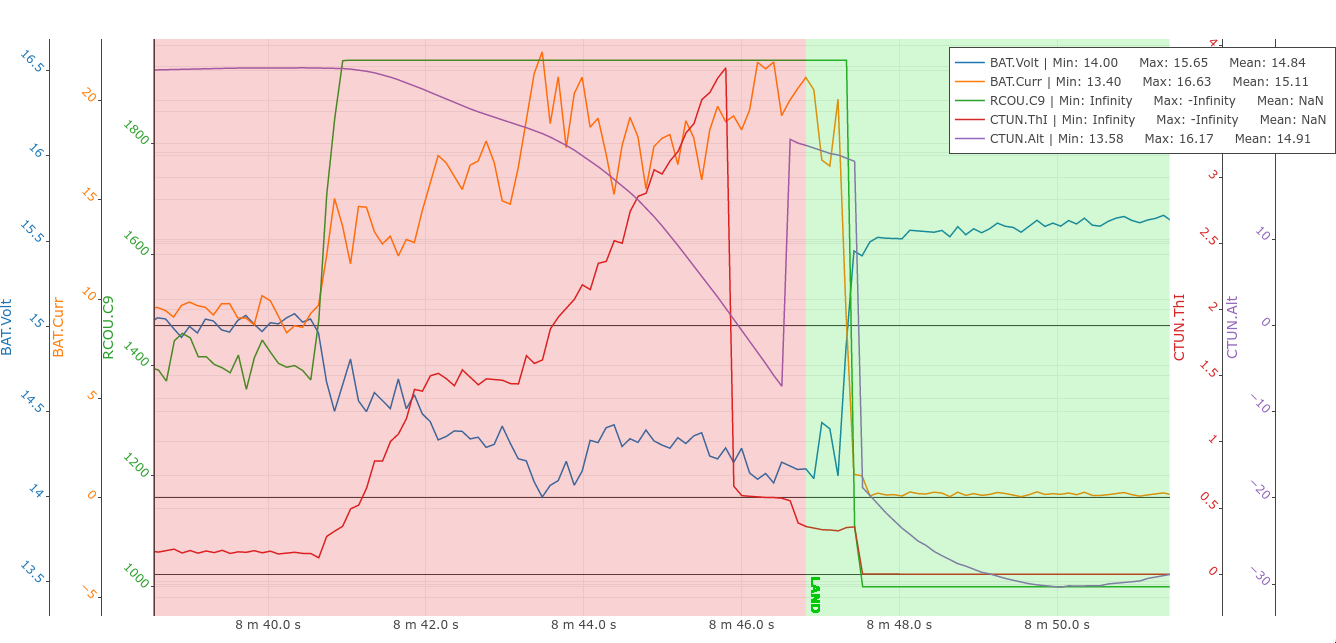
Unfortunately cannot find what leads to that crash(well lost of thrust is rather consequence, right?).
The drone is about 1.2kg on 10" props plus 810kv motors, powered with 4000mah 65c battery. Its usual flying current is around 10-15Amps. From daily testing voltage around 14V (lowest on a graph) is OK and was tested before - it is completely flyable one. Vibrations seems to be quite low as well.
Please help me and point me out what parameters i can check?
2021-05-15 19-08-14.log.param (17.3 KB)
Dataflash log: https://drive.google.com/file/d/1Vl75IMynVE5fZS7Bl2bvzJ_7RGE3MIM8/view?usp=sharing
I’m using dshot protocol so that motors are connected to AUX1-4 -> C9-C12