Hello,
when i fly forward in loiter mode quad first loses thrust and increases thrust.
then when i checked motors front right motor is hotter than other motors.
in acro mode it flies without problem.
can someone check my log please?
regards.
https://drive.google.com/file/d/17x2KInPoVDfOTRkxS-CZxemPjzpa7R77/view?usp=sharing
Several things wrong here:
You haven’t configured the Initial Parameter Setup. In Mission Planner Mandatory Hardware.
The craft is a bit overweight/underpowered and there is a mechanical yaw bias.
The battery sagged to ~14.5V which on top of the lack of thrust produced the “Potential Thrust Loss” error.
Is it a 6S battery that wasn’t fully charged or is the voltage sensor not calibrated?
Your vibration levels are very high with >1000 clipping events during this flight. There was a Vibration Compensation FS triggered.
Tuning is poor.
You have the Bdshot version of firmware and Dshot configured but have not configured the Bdmask so no motor RPM.
You have some work to do.
This shows the thrust, yaw bias and battery issues (see Motor 1 pegged?):

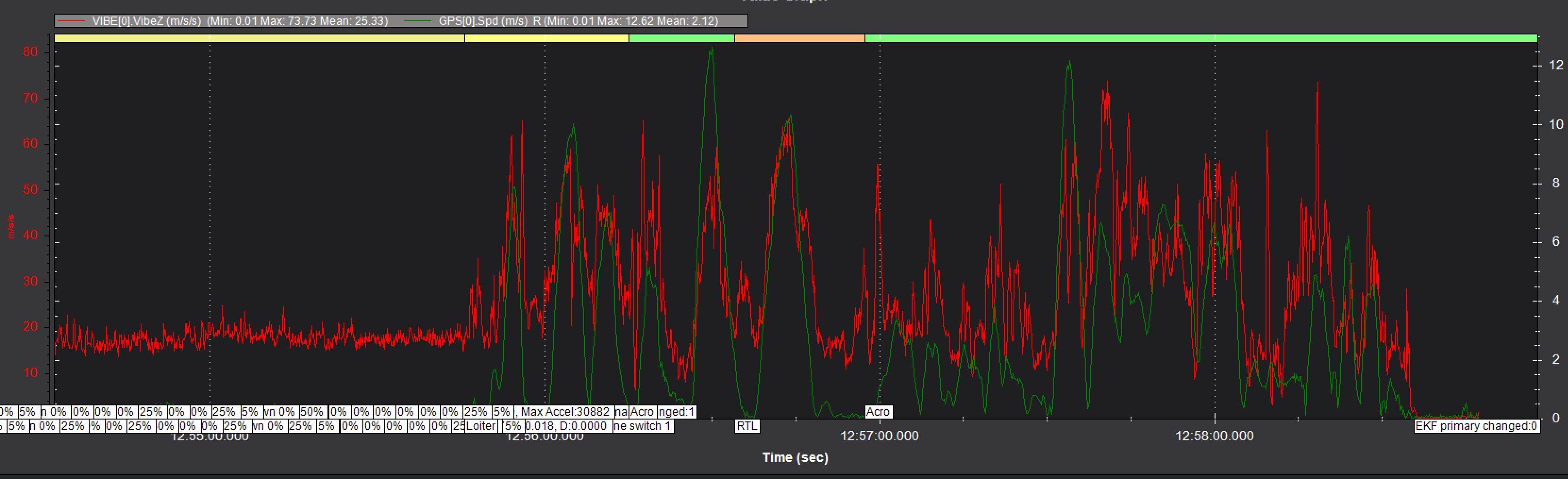
This shows terrible Vibe levels, Vibe Compensation FS, Thrust loss error and GPS Glitch:

Ignore thrust loss error because it came at end of flight when i was landing.
Bdmask must be ch1-ch4? About tuning what i can do better?
Thanks for help.
It’s still underpowered and before the thrust loss motor 1 was commanded to max. And as I said the CCW motors are commanded higher than the CW motors typical of a mechanical yaw bias (twisted motor mounts or arms, props not level).
- Perform the Initial Parameter Setup.
- Set SERVO_BLH_BDMASK for all motors.
- Deal with the high vibration issue. No amount of filtering will fix this.
- Check the prop level.
- Improve the thrust/weight.
- Configure the Dynamic Notch Filter once you see ESC RPM in the log (follow Wiki)
Then you can think about tuning.
how i can see ESC RPM log?
when i opened the log with mission planner where i should look?
thanks.

Same problem with 4.2 firmware. i built up new quad with different motors and props but nothing changed. this time 2 motors are getting hot. in acro mode no problem. tomorrow i will try MatekH743 firmware.
Another question Vibe logs show after Autotune vibration levels change. is there any explanation for this?
Thanks.
https://drive.google.com/file/d/1kGqQgmsANJDSUV1-vpOFxeBOaznfDEMj/view?usp=sharing