The throttle in our Skysurfer seems over sensitive in flight, it’s constantly hunting up and down. This sensitivity is not due to airspeed which stays relatively constant but is reacting to pitch, even small pitch changes cause large changes in throttle value. Lowering THR_SLEWRATE helps but is system-wide so not ideal.
How can I get (which parameters to change) the throttle to not react so fast to pitch errors?
Thanks Tridge, I have tried all those but the problem still exists. I have a suspicion that this is due to the motor on the Super Skysurfer, while using the raised motor mount causes the nose to pitch down with throttle application. This sets up a low frequency oscillation with the throttle backing off because of the nose down pitch and then with the thrust removed the nose pitches up again and the cycle starts again.
This problem still plagues us terribly, I have tried TECS_THR_DAMP from 0 to 0.9, TECS_TIME_CONST from 3 - 8 and THR_SLEWRATE from 100 to 20%, only the last has a slight effect on this oscillating throttle.
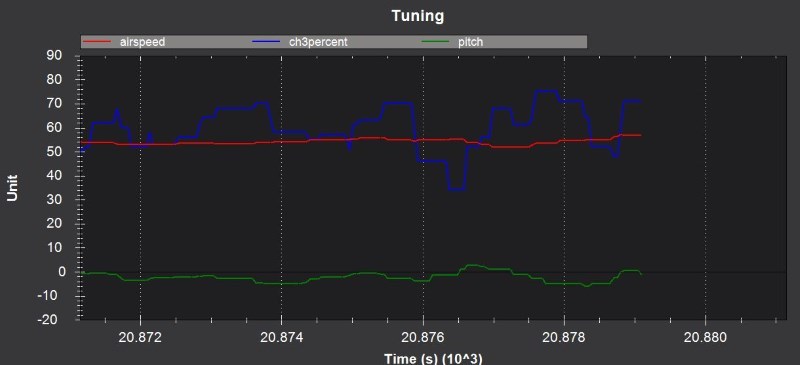
In calm air and often downwind it’s fine but turn into wind or have it a little gusty and the throttle constantly jumps between 30-70%. Audibly it’s very noticeable. I’ll post a log tomorrow, hopefully someone can get to the bottom of this darn annoying issue.