Uploading: 1.png…
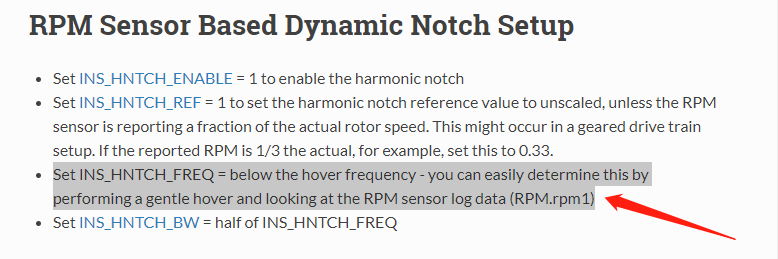
The prompt INS is displayed here through machine translation_ HNTCH_ Freq uses RPM1 of the log file to confirm that if my propeller is 1400pwm, should I fill in INS here_ HNTCH_ FREQ=1400? This is obviously not a normal value
Im not sure if I understand your question correctly, but I’ll give it a try
Setup ESC telemetry and make sure number of poles are set correctly in params. Then perform a hover for 30 seconds and land. Download the dataflash log and graph RPM.rpm1. Here you can see the avg rpm that your motor 1 is spinning at. Now Divide the Hover RPM Value by 60 and get hover frequency.
Set INS_HNTCH_FREQ param a couple hz lower than this hover frequency you just calculated
Thank you very much. Now I understand that their units are different. I have ignored that the rotation speed is in minutes and the frequency is in seconds.
In addition, what I don’t understand is that I debug a large helicopter. If the propeller rotates at the speed of 1500rpm and is converted to frequency, then this frequency completely enters the control frequency of the UAV. How to distinguish them?