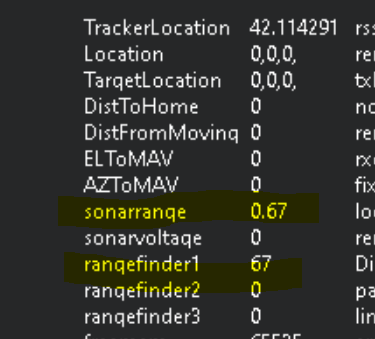
Do you mean the way its represented in MP? The rangefinder1# is right on. The sonarrange seems to be offset by 100.
I did some quick measurements and tested against a wall 4 1/2 meters away. The rangefinder said the wall was 450 away and the sonarrange was 4.5 away. Both are correct if the units are CM and M.
I will take a flight tomorrow and get some real numbers. It raining currently
Ok
I will check on my side as well, because I never really looked at Mission Planner rangefinder numbers on the HUD , just on the logs and on the proximity “radar”
Thanks, looking forward to what you find out. I mean I looked at the code for precision landing and such. They all use the rangefinder data, not the sonar data. So that might be a mission planner thing.