I’m having massive issues getting TF-Luna data ( 3x Luna on I2C on Pixhawk ) to mission planner and Qgroundcontrol over Sik Radio(s) .
The TF-Luna’s are connected as Rangefinder 1 , 3, ,and 7 in Arducopter.
I tried 433 , 915 , and 2.4Ghz none of them work .They connect then disconnect all over again and when connected data is so slow that loading data in Mission Planner or Qgroundcontrol takes about 15 Minutes. .
I tried all different speeds for the Air Units and Ground Units and also on the Pixhawk board ( Serial 0 and 1 ).
No problems however over usb connection , not even on 9600 Baud.Data loads in seconds and Rangefinders 1,3, and 7 are visible and working Fast. ( In Radar Screen of Mission-planner , no data in sensor overview).
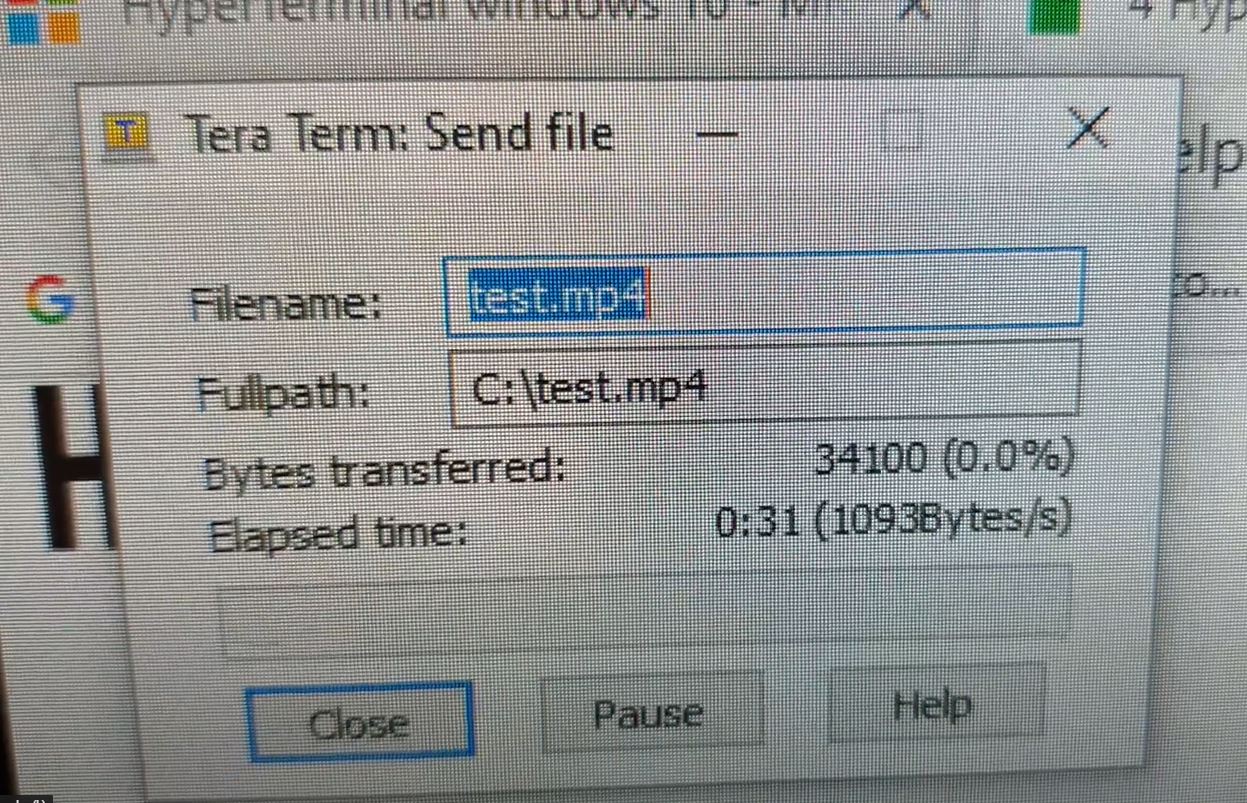
Tested the different Grounds and Airs connected to two PC’s and used TeraTerm to send a large file from one Pc to another and got speeds of 13000 Baud.
I can’t seem to reach this on Mavlink protocol .
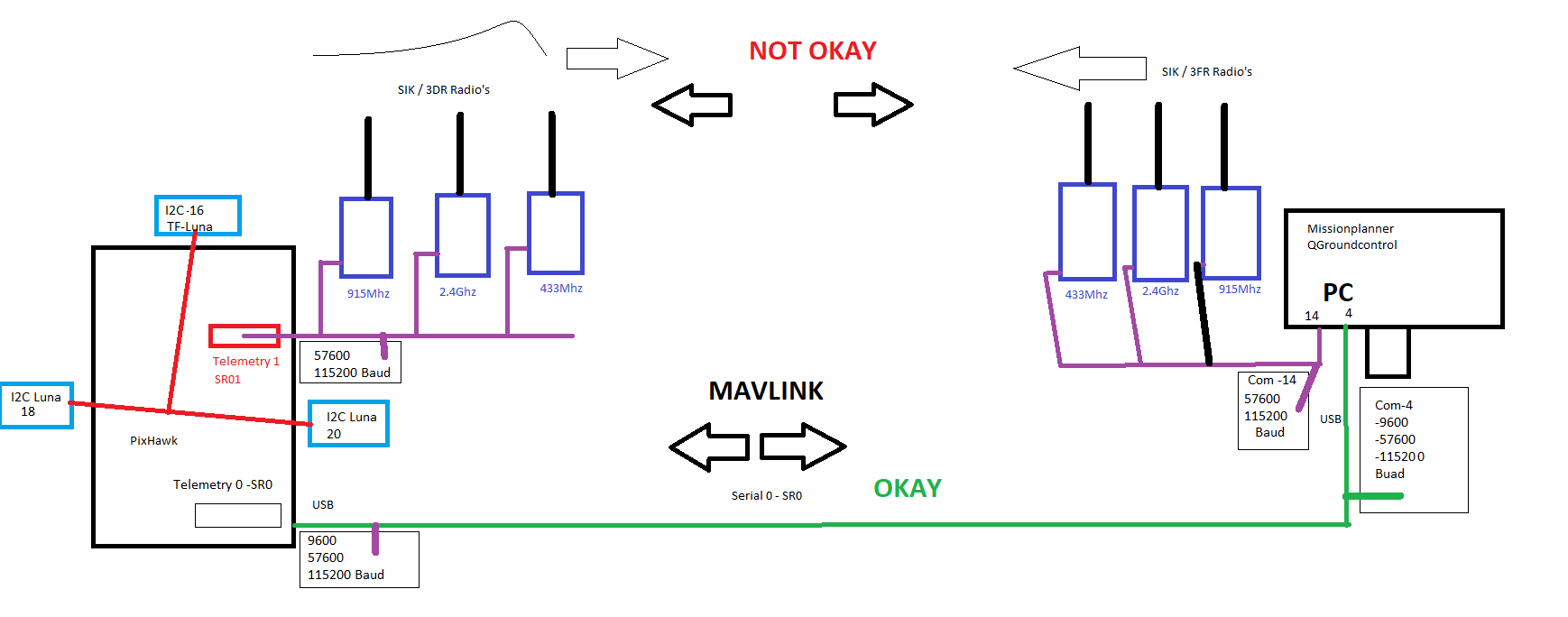
see attached schema.
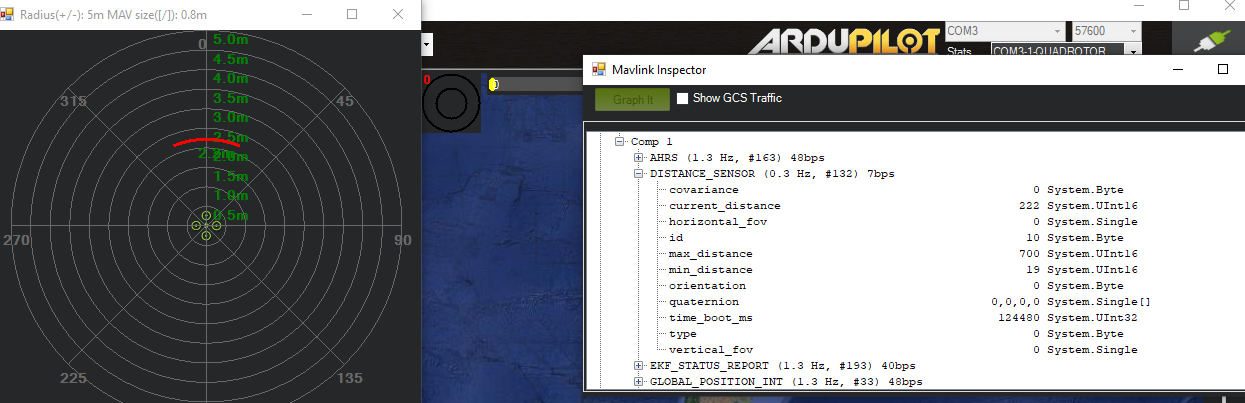
SIK on 915 Mhz (@57 kBPS) , a lot of latency and buffer overflows when trying to display,. Please note that I am using cheapest SIK with no handshake (CTS- RTS).
This screenshot was taken just after parameters received and it display once or twice beffore getting stucked and the frame rate was 0.3 HZ
I see one big difference in our setups when i’m right ?. I don’t use an Arduino in between sensors and Pixhawk . I changed the I2C addresses of the TF-Luna’s and connected them all to the Pixhawks I2C port. But however i see the same effect !.
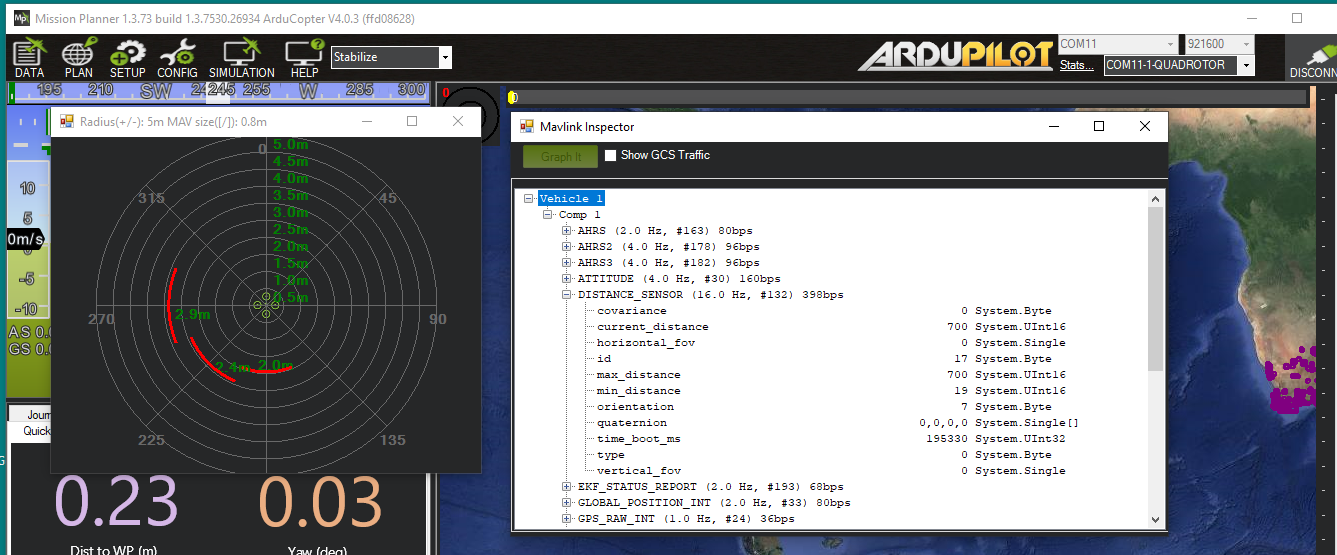
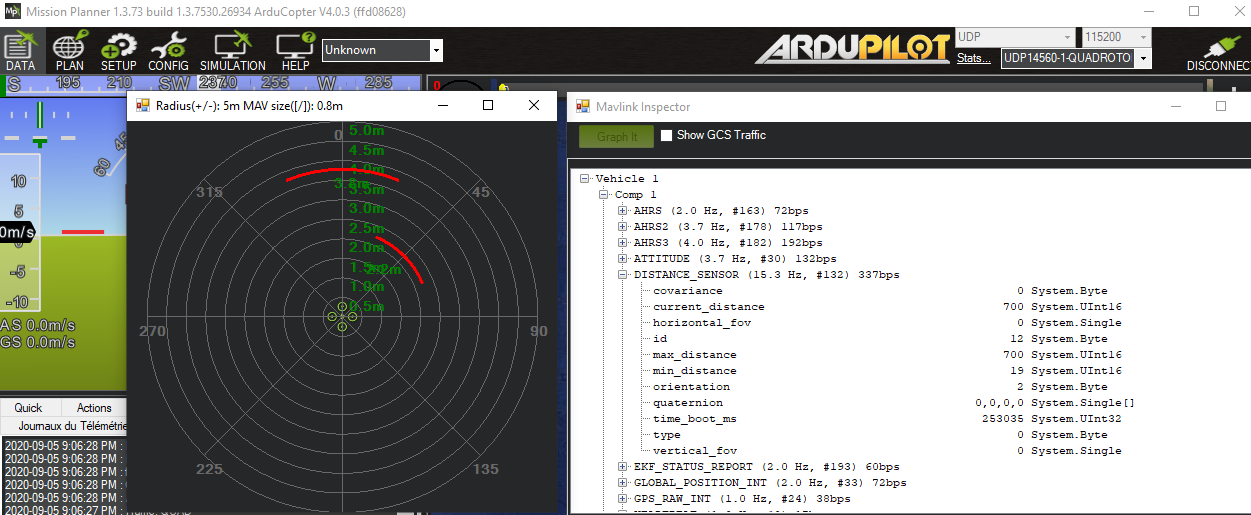
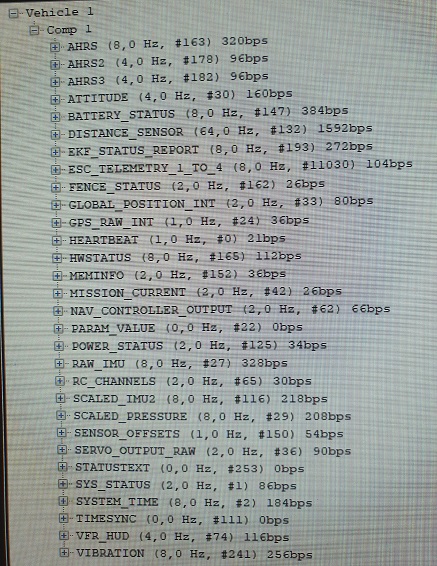
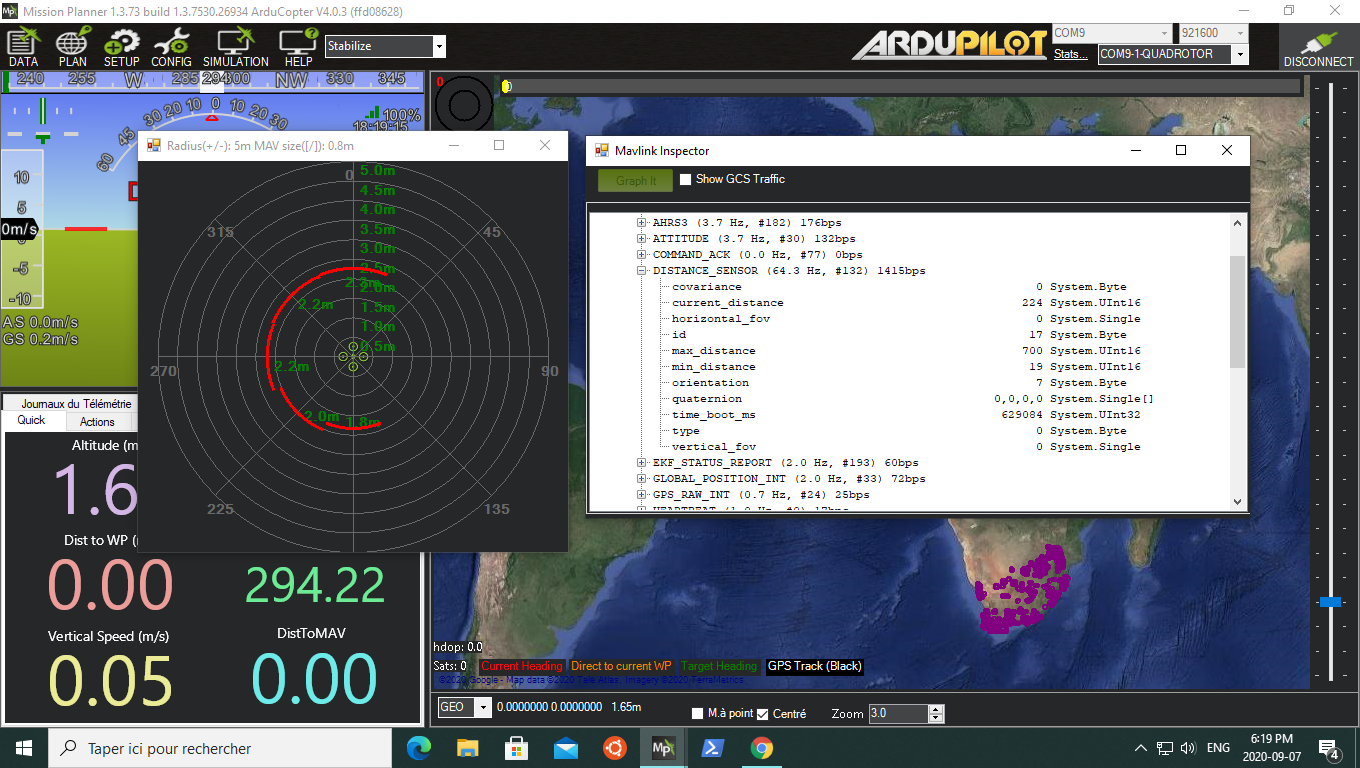
Regarding distance_sensor data i checked this on USB connection because up till now its not possible on 433Mhz ,915Mhz ,or 2,4 Ghz radio.
On Usb connection i see realtime changing of distance on all sensors and a lot more data (64Hz and 1592bps) ! then in your case . See Picture.
This was ~1090 Bytes/sec = ~8700bps =already enough for the data i’m sending.
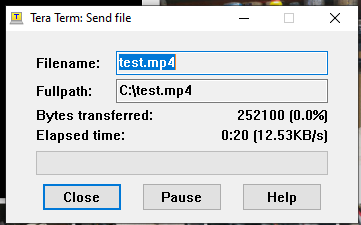
On 115200 Baud i get a transfer rate of: ~100000bps
So…that’s the reason why i started this threat .
-I,m not suspecting air_speed is the problem anymore.
-I thought about using an Arduino or/and I2C multiplexer but am pretty sure now it will give me the same problems.
1- even on slow speed usb to Pixhawk , all works like charm real time.
2-on higher speed than Usb direct connection , it does not work on SIK.
What could be the cause of this ?. I suspect some kind of translation mixup from Mavdata to Air data and back ?. Or maybe my 3 sensors being seen as one when using SIK Radio ?. Realy need some help here .
The TFMINI S are on I2C bus with different addresses (the Arduino was used on the POC1) the difference in Hz is probably caused by processing power; the above tests are with a pixhawk
As I wrote before the 915 MHz SIK radio get flooded by distance messages this is why we switched to WIFI telemetry like the ESP01 demonstrated above
Hi Thank you again ,
So your saying even though air_speed is enough to send and receive all my data "
the Sik radio’s get flooded with data
"?. I’m not expert enough to understand this ?! . Is it a hardware issue ? in your opinion ?
As mentioned , i also used 2.4Ghz and had the same issue .
So , it could be a SIK radio problem . A translation issue i mean. My 2.4Ghz is based on 3DR Radio. You took the 3DR/SIK Radio part out of the equation.
Hi ,
Thanks for discussing this , really appreciate it.
I did an other test USB 9600 Baud…no problem at all , fast loading and response of the TF’s in mission planner. (will upload a video link ).
So it’s not too much data being send that causes the problem ( edit -I was wrong here ! see below-to much measurements ) , speed is most certainly not the problem.
I agree with you another way of sending the data (NOT SIK ) would overcome my problem probably.
I would however rather have this problem where Sik /3DR radio is not able to send this data solved.
In this way i can use my long range 915Mhz as i would like it. And use it for my Mavlink controller in near future.
So this is where the help is needed i think .getting existing hardware working ?.
If you have the V2 release, you can try to implement hardware handshake using the RTS-CTS
I am pretty confident that this will make the radio work much better as the handshake prevents buffers overload.
Other options would be reducing the distance message rate as as you can see, it generate a lot of data.
Hi I do have a 433Mhz , V2 lying around .
I will test it with RTS-CTS.!
EDIT- No change in result when using RTS-CTS
EDIT-2 - With a little help i got a luna on 40Hz and 10Hz ( one active on drone ) this made no difference also. (EDIT-3- Luna did not stay on 40Hz or 10 Hz cannot save settings )
So there is a way to reduce the data the Luna’s send over Mavlink Sik Radio
It’s in the planner Tab of mission planner under sensor rate.
Mine was 8 = 64Hz , reduced it for test to 1 = 8Hz.
8Hz is still 8x100 measurements /sec/Luna.!!
Other sensors like esc’s in my case are also affected by changing this setting .
Reducing the 100Hz of the Luna’s to about 10Hz could be an option to not block Mavlink traffic.
But it’s a shame to compromise on what the Luna’s are capable of just to un-block the Mavlink data stream.
I tested a direct serial connection between Pixhawk Telemetry 1 and PC-Mission-planner.
To my surprise this gave the same results as Sik Radio.
So one could say , the Luna’s just produce to much data for Mavlink Telemetry ports apart from the Serial0 (don’t know why other then less devices active).
As a solution i would like an option where one could set amount of packets being sent per sensor or some kind of divider "send 1 of 100 (rangefinder) measurements ".
@ppoirier,
Something’s coming i found the (my) solution !.
I already send 2 Luna data with lightning speed over 915Mhz Sik Radio. Its surprising and cant explain it completely.
 ) , speed is most certainly not the problem.
) , speed is most certainly not the problem.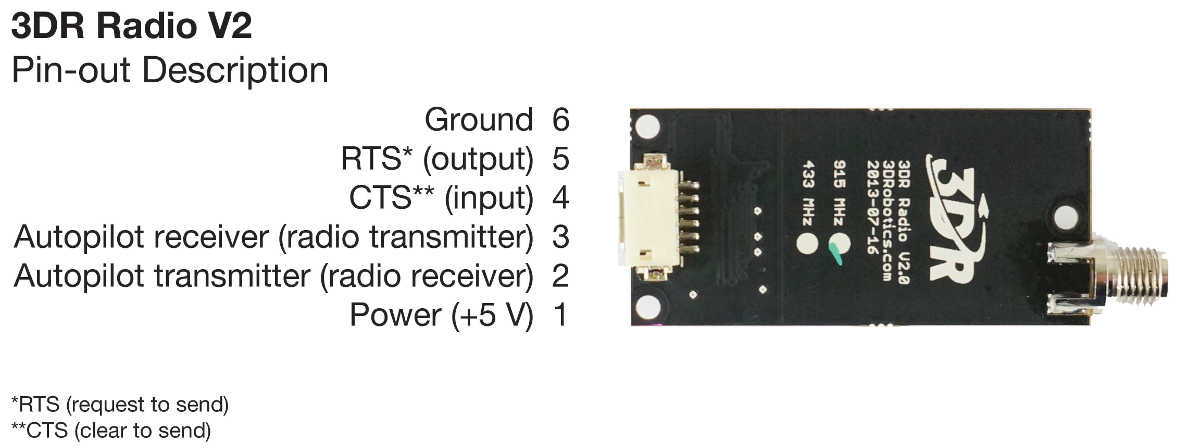

 Its surprising and cant explain it completely.
Its surprising and cant explain it completely.