A few users have suffered with their rovers driving in the wrong direction or with steering and throttle controls apparently being reversed. There are a few potential causes but the most common cause is having the RCx_REVERSED or SERVOx_REVERSED parameters set incorrectly.
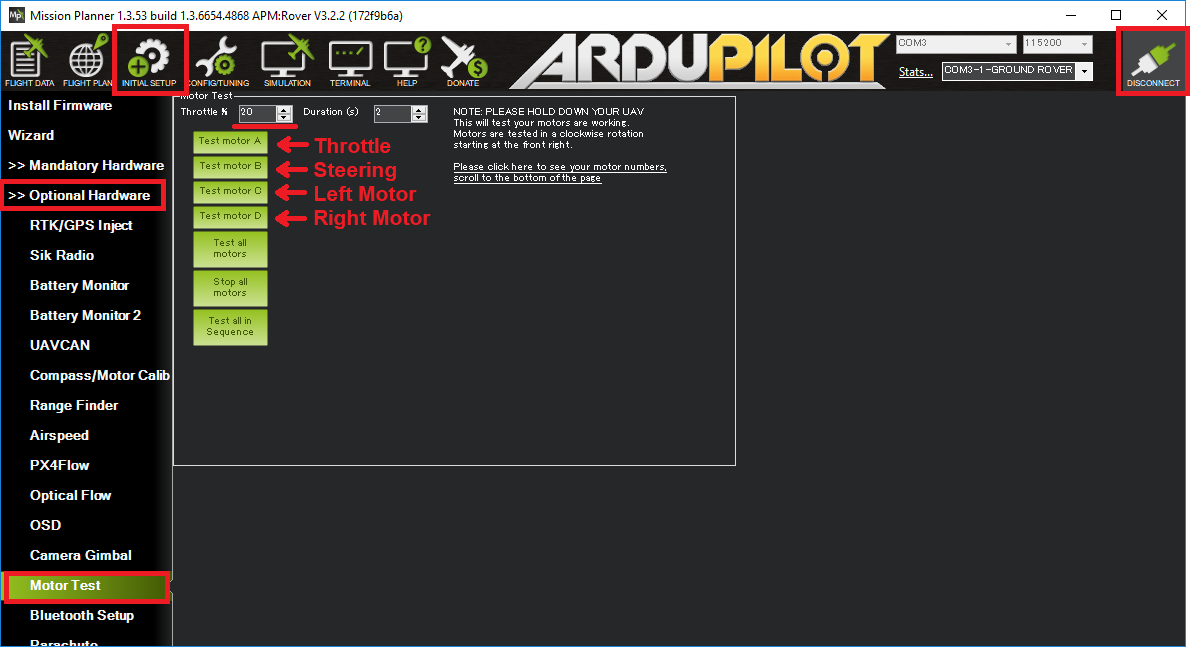
Rover-3.2 includes a “Motor Test” feature which allows testing that the output (controlled by the SERVOx_REVERSED parameters) is correct and I’ve just added a section to the wiki here.
… and the pic below (from the wiki) gives the basics of how it can be used.
Hope this helps!