Hello everyone
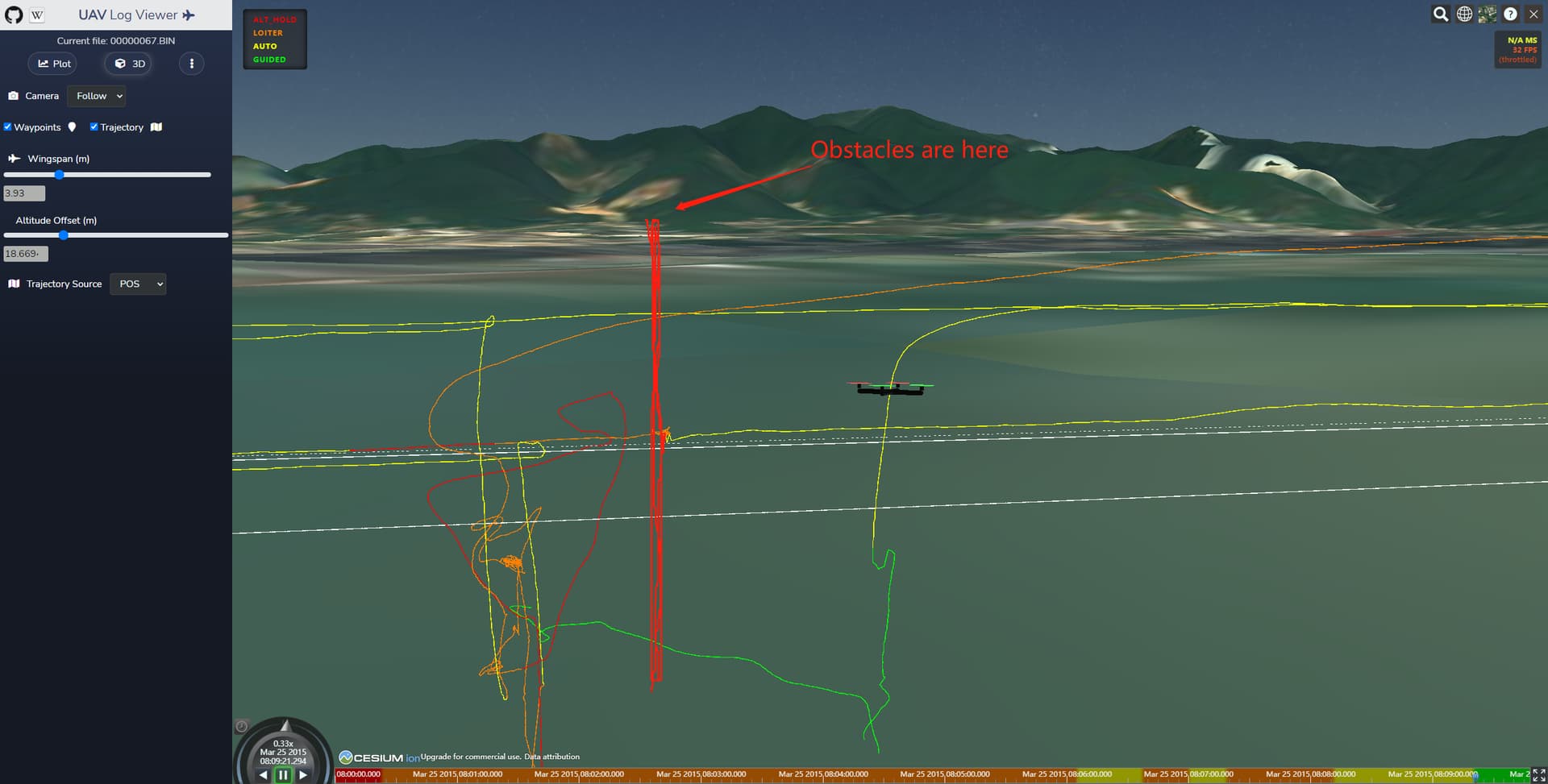
This afternoon, I conducted an automatic mode object avoidance test with my friends. After setting the parameters according to the document, the aircraft will fly. When the aircraft detects an obstacle, it will automatically lower the altitude until it touches the ground and rolls over.
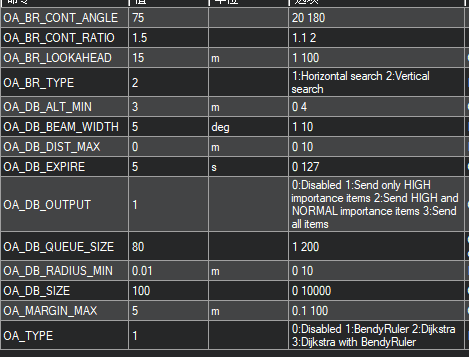
Set reference documentation to this pagehttps://ardupilot.org/copter/docs/common-oa-bendyruler.html
According to the description of the video in this document, when the aircraft detects an object, it will rise upward to avoid obstacles. Why does the aircraft lower the altitude when I test it and cause an accident
The aircraft is x4 structure
Firmware ac4.1.5
flight control cuav v5+
Lidar is benewake TFmini Plus
The TFmini plus rangefinder is installed at the bottom of the aircraft in an unobstructed position, facing the front of the aircraft
参数配置文件
x4 ac4.1.5.param (17.6 KB)
log filehttps://drive.google.com/file/d/1bS5ymlYZ16o1x90MK3JsJoxRCcyxm5Eu/view?usp=sharing