Hi. I have pixhawk cube black. Arducopter 4.0.2 .
GPS : Here GPS ( 5 HZ , 38400 )
GPS2 : Tersus RTK ( 10 HZ , 115200 , NMEA )
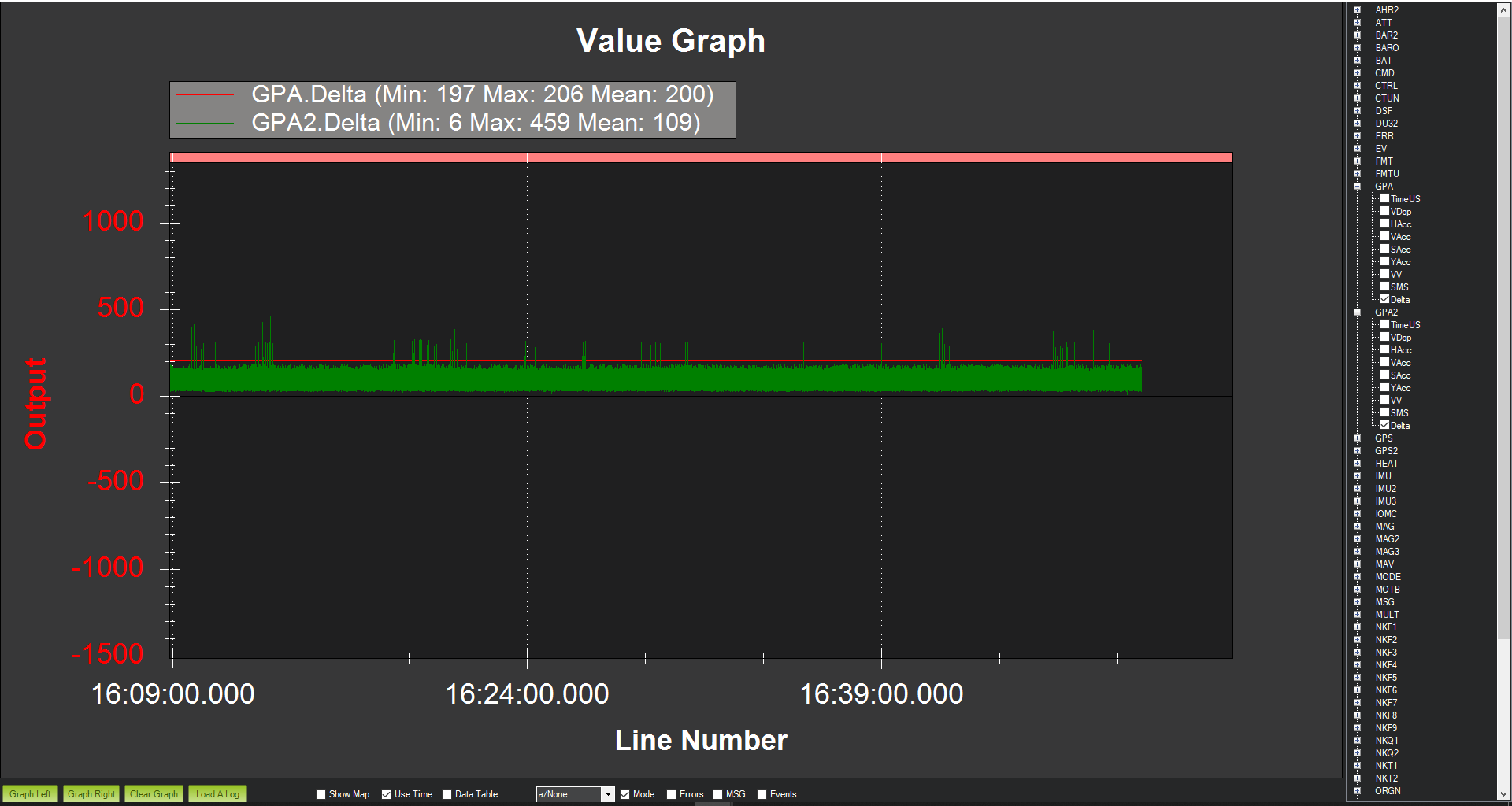
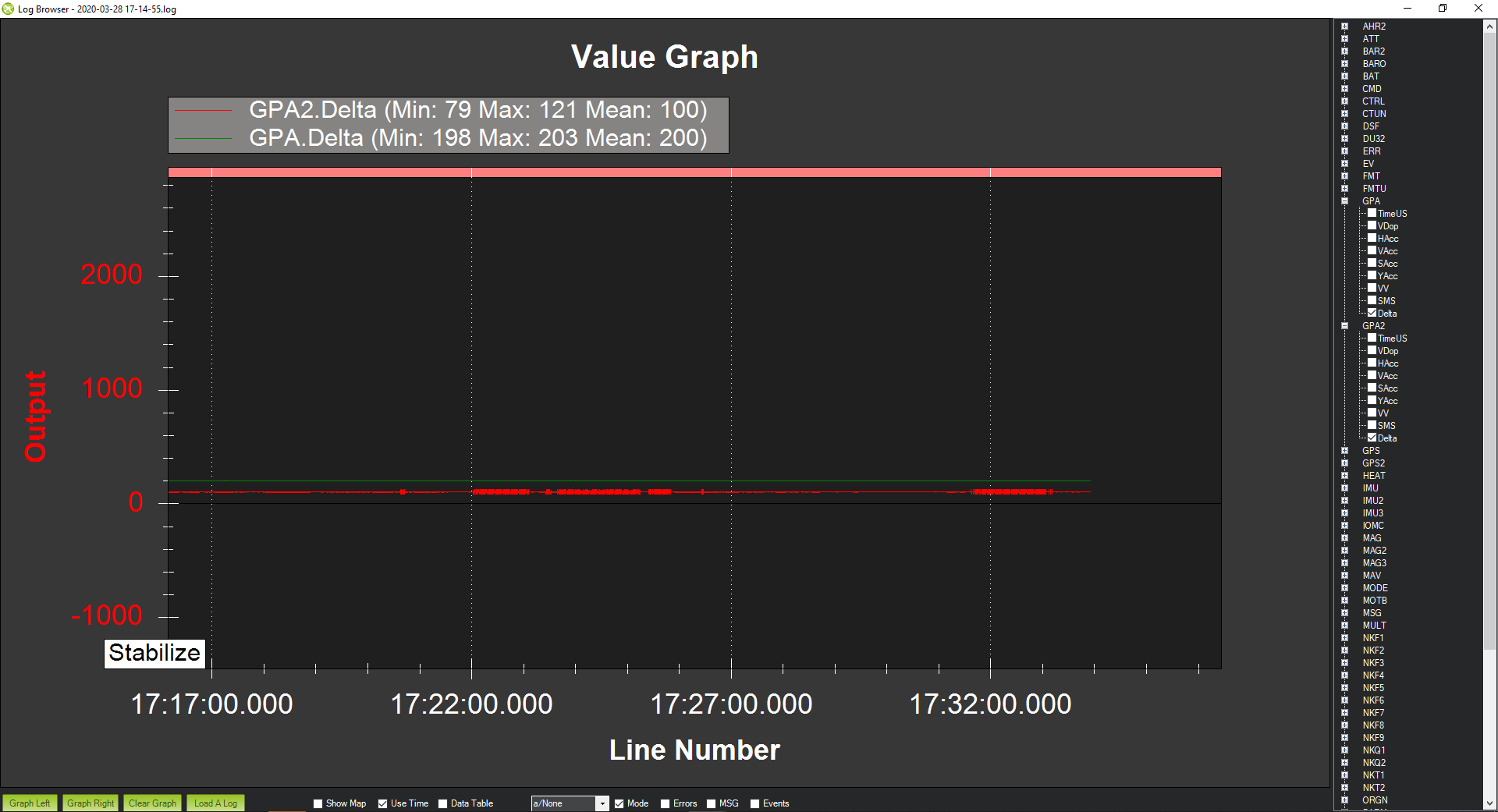
Why ı get hıgh GPA2_DELTA ?
Hi. I have pixhawk cube black. Arducopter 4.0.2 .
GPS : Here GPS ( 5 HZ , 38400 )
GPS2 : Tersus RTK ( 10 HZ , 115200 , NMEA )
Why ı get hıgh GPA2_DELTA ?
Any idea ? ıs there Tersus RTK users on pixhawk ?
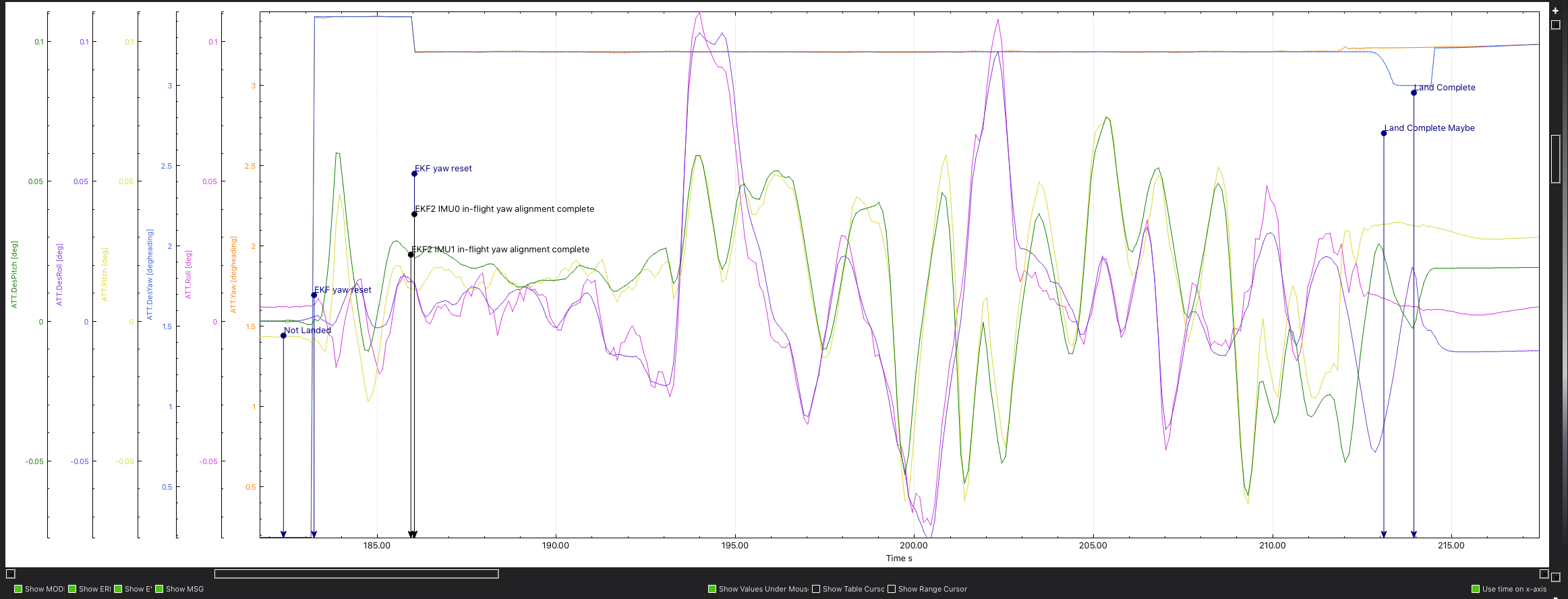
Drone flyaway on hover , not poshold . (When RTKfixed )
You haven’t given any details about the copter but your Desired V Actual is not looking good.
Have you been through the tuning page here?
Your GPS had nothing to do with the ‘flyaway’.
I’m not sure about the GPS issues sorry, to me HDOP looks to be going low sometimes.
Not really to do with the “fly away” but I’d definietly set these:
INS_GYRO_FILTER,30
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
Edit: I meant to say HDOP seems too high sometimes , not low
Thanks your comment. İf it fly with here gps , no problem , drone is very stable . When ı actived gps2 ( tersus RTK ) , drone is not stable .
Thanks your comment.
May be I used wrong phrase. Drone was not stable , it fly 3-4 meters dancing .
Thank you … Problem solved …
Would you mind sharing how you solved this problem?
I’m not sure exactly.
I reset ( factory settings ) the GNSS board and the problem solved.
Hi Uygar
We are trying to use the Tersus RTK system too.
We have not been able to the RTK fix, but we believe that is because the FW that the units shipped with was not the latest.
When you said that you did a factory reset on the GNSS board, do you mean that you reset the TERSUS DAVID and B316 units to factory settings?
If I may ask, what settings did you change on CUBE?
Do you have the system working reliably now?
Are you using the RTK system for heading too?
Thanks!
Hi Graham. I have BX316R . ı upgrade it to BX316 .
I bought the rtk activation code from Tersus . RTK works , ı can see RTKFix but drone not stable on hover.
You can see here : Flies hover by circling a 2-3 meter diameter circle in RTKFixed
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_BLEND_MASK,5
GPS_BLEND_TC,10
GPS_DELAY_MS,0
GPS_DELAY_MS2,0
GPS_GNSS_MODE,0
GPS_GNSS_MODE2,73
GPS_HDOP_GOOD,140
GPS_INJECT_TO,127
GPS_MIN_DGPS,100
GPS_MIN_ELEV,-100
GPS_NAVFILTER,8
GPS_POS1_X,0
GPS_POS1_Y,0
GPS_POS1_Z,0
GPS_POS2_X,0
GPS_POS2_Y,0
GPS_POS2_Z,0
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_RAW_DATA,0
GPS_SAVE_CFG,2
GPS_SBAS_MODE,2
GPS_SBP_LOGMASK,-256
GPS_TYPE,1
GPS_TYPE2,5
and
SERIAL3_BAUD,38
SERIAL3_OPTIONS,0
SERIAL3_PROTOCOL,5
SERIAL4_BAUD,115
SERIAL4_OPTIONS,0
SERIAL4_PROTOCOL,5
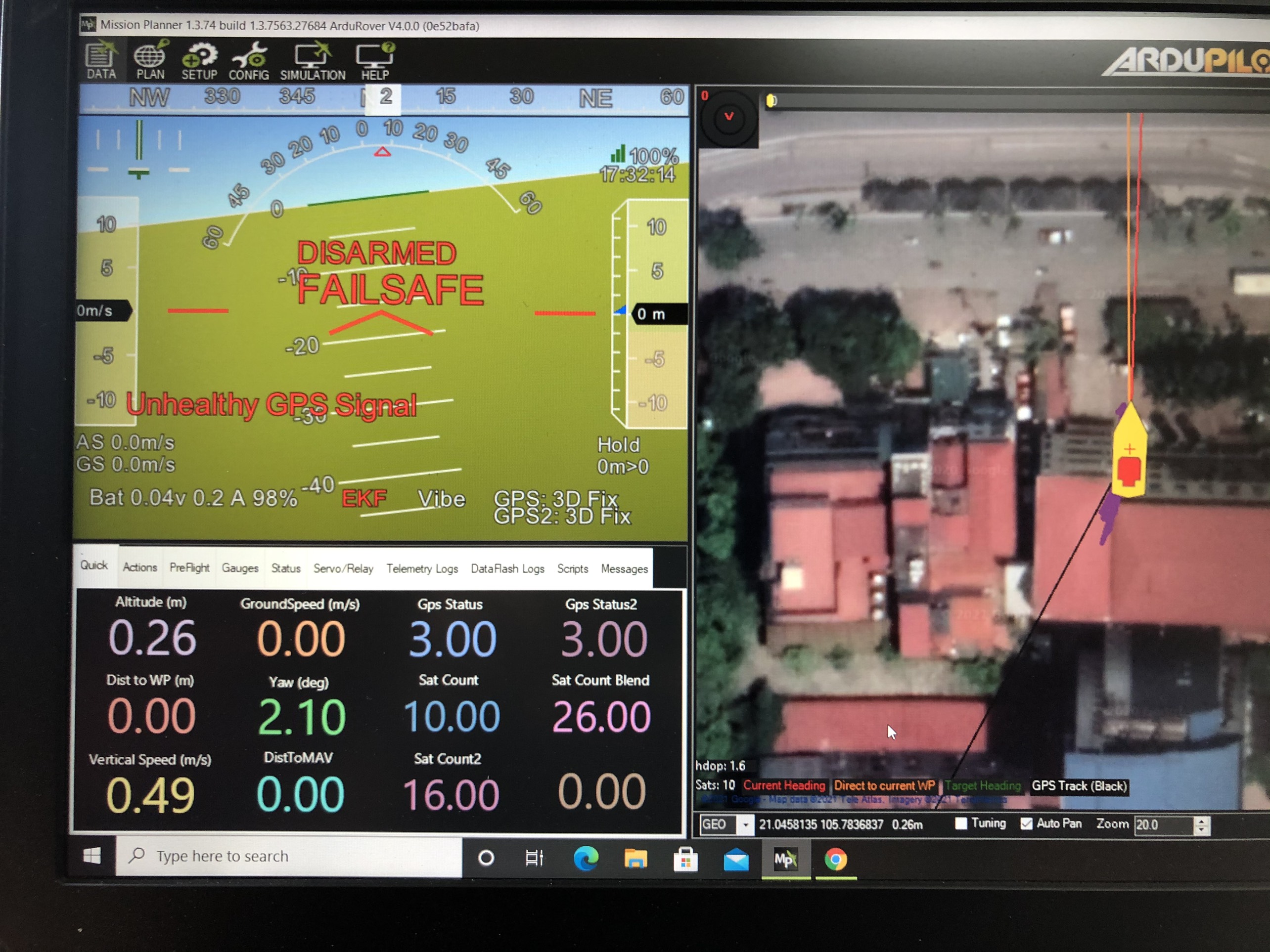
Hi all, pls help.
I also use gps 2: tersus 316 and follow setup on pixhawk 2.1 cube black but gps2 status not running throw. pls refer video and pictures.
https://drive.google.com/file/d/1YCysXwboV9EZCBavHfyBi1FcwFUDWMRD/view?usp=sharing