I have some problems with my Cube Orange with Copter 4.0.2: I’m trying to get the telemetry data via OSD to my googles and via flightdeck to my Taranis.
On the OSD i have the strange behavior that the flightmode is frequently switching to Stabilized and that the whole OSD screen switches to the summary screen while flying. I’m using a micro minimosd. Same ground cable on the video and on the power pin. Power source is the 5V VTX with a capacitor to reduce noise. I already tried another micro minimosd - same result. And i also tried different Minimosd-Extra versions. I have similar setups on other drones - and those work just fine.
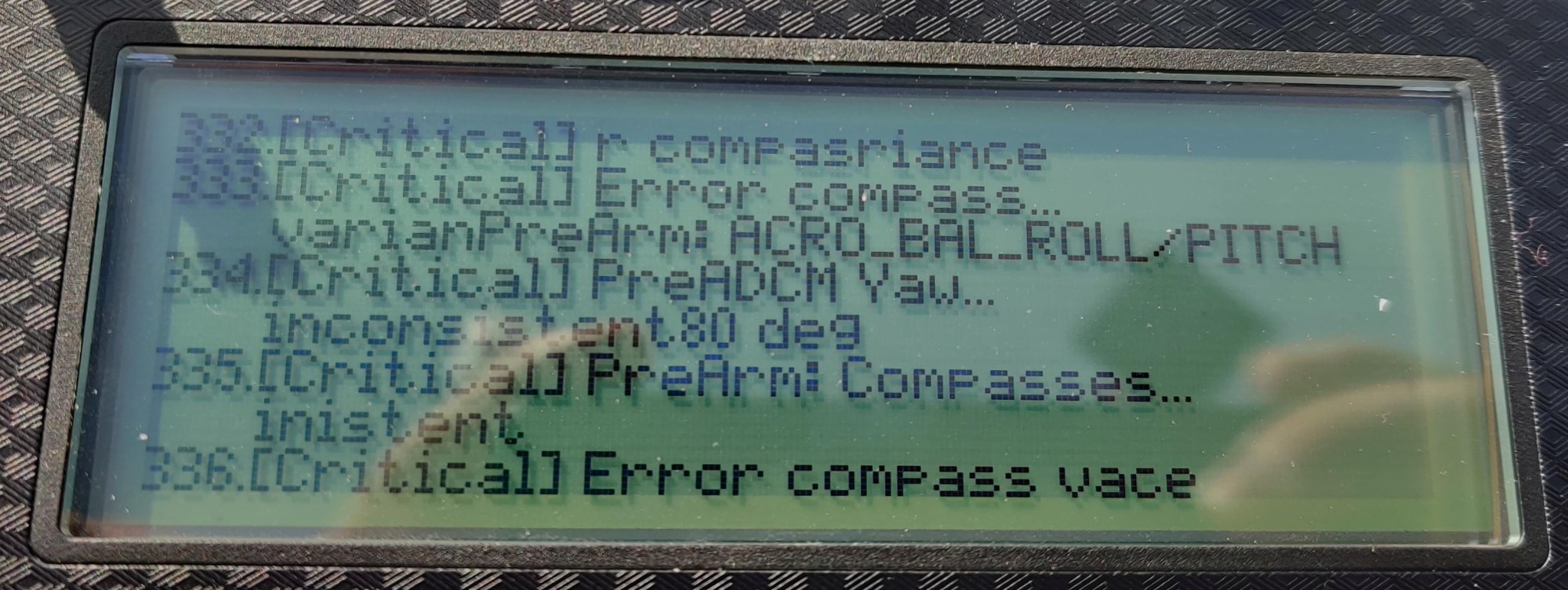
And on my Taranis the messages from the flightcontroller doesn’t show correct:
Are there maybe some changes in the Mavlink protocol in Copter 4.0?