About 1 in 5 of my takeoff’s can be what you could call exciting. As I increase the throttle to take off speed the helicopter will leap into the air to an altitude of 2 -3m then immediately back down again which I will have to catch before hitting the ground. This will continue 3 or 4 times. At the same same time I will have to fight with pitch and roll to maintain some level of control. After a few seconds it all settles down into a nice hover. If I land and takeoff again several times its ok
@ardisd David,
is this an electric or combustion engine helicopter? I see you have a throttle curve selected for the RSC. I don’t see anything in your params that causes me concern. Are you sure your rotor has reached operating speed? could the engine response be lagging behind and causing this issue? What size heli is this?
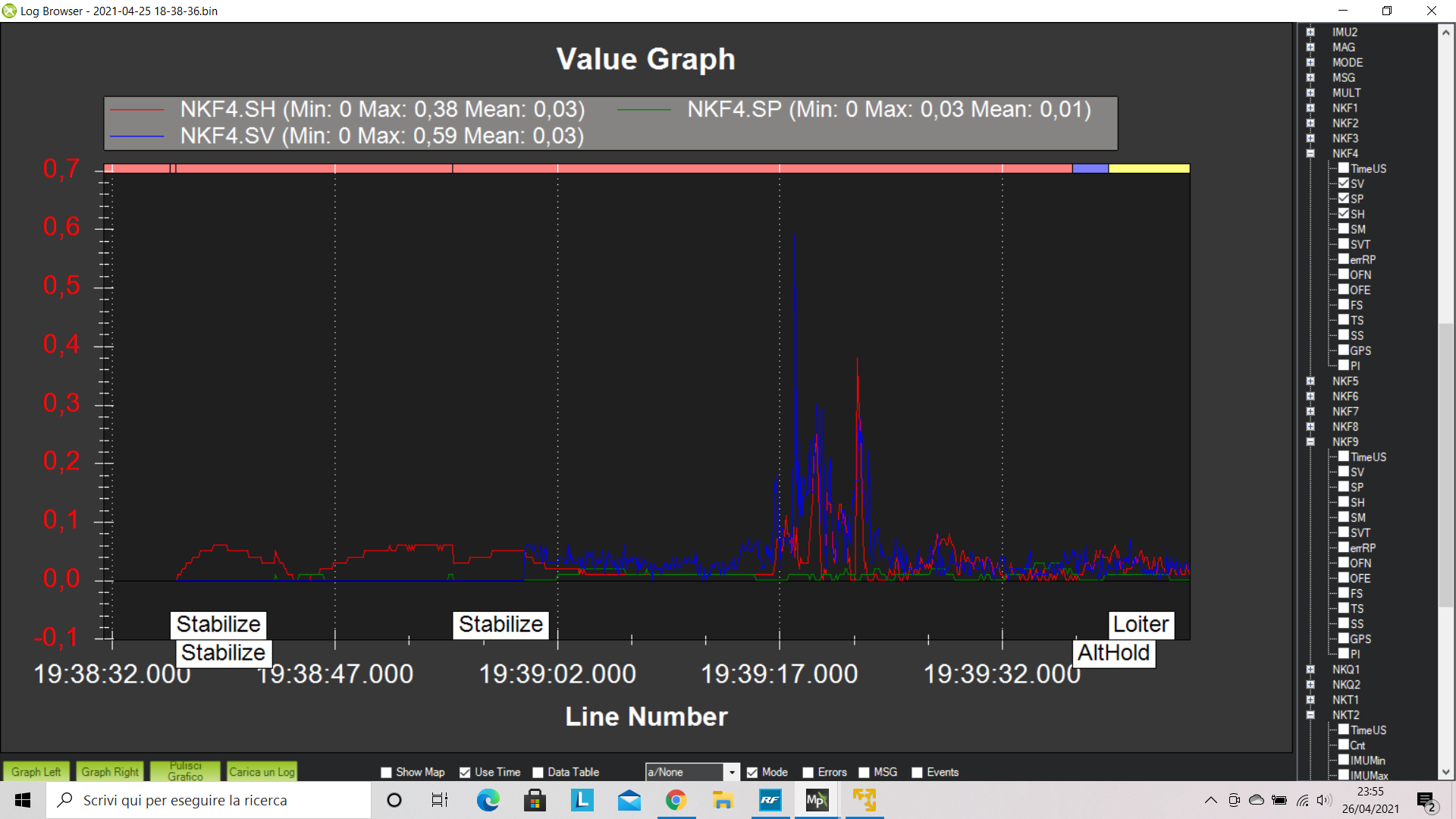
Well I am almost sure that it is not a software issue. I can only guess that it is hardware related. either the flight controller or the servos. In stabilize mode, there really isn’t anything in the control path for collective that might cause this. The servo outputs show to be consistent with the collective. But you can see when the aircraft jumps off the ground. I think it may be something hardware related but not sure what.
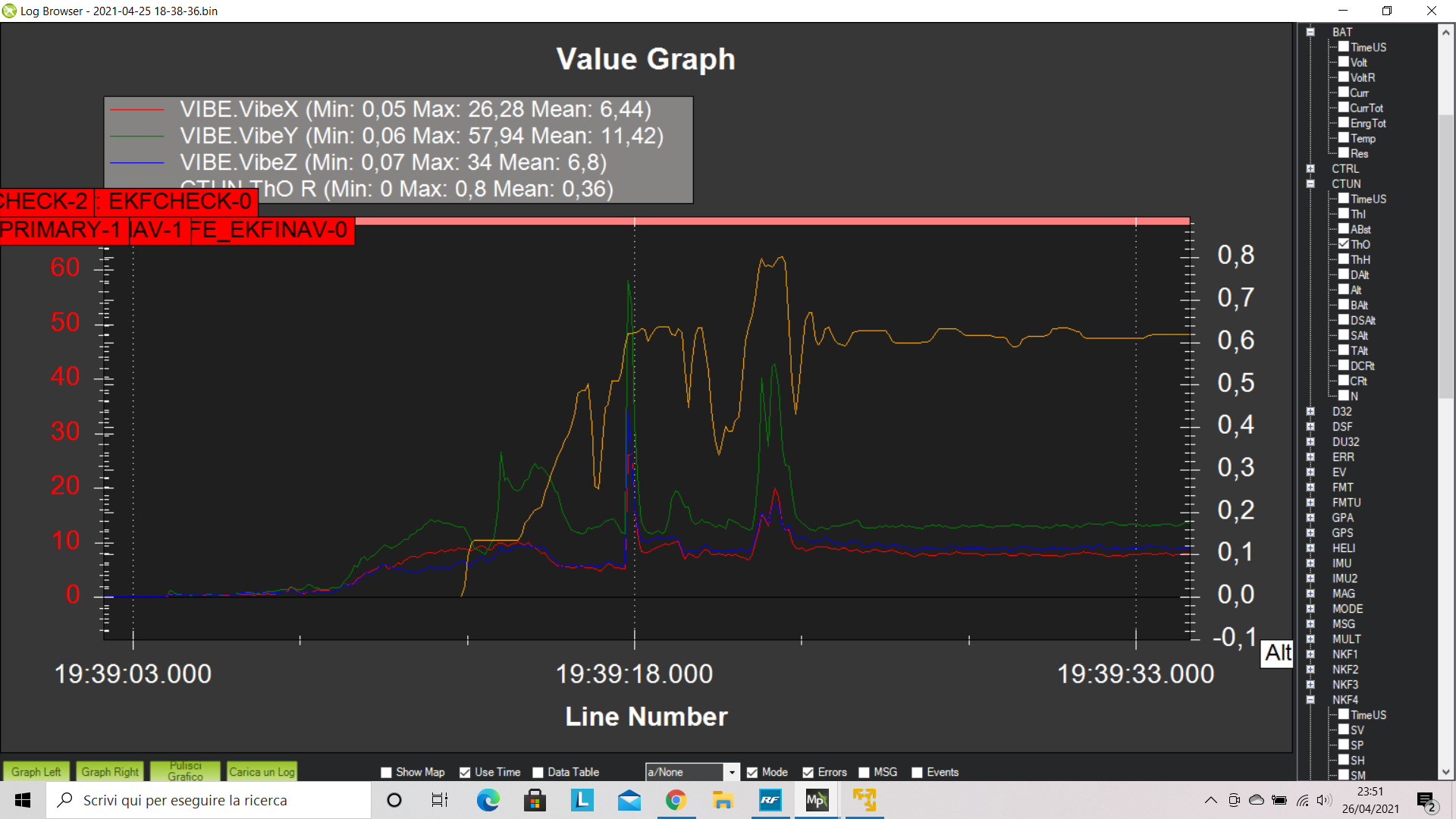
As a reference, they should always be around 0.15-0.25 range.
looks like you waited 10seconds after engine switch was flicked before applying collective, was the rotor at nominal rpm? sometimes (if rotor blade bolts are too tight and rotor speed is not high enough) it might happen that rotor blades are not properly self-aligned due to insufficient centrifugal force, hence the high vibrations you are experiencing. Once everything gets properly aligned vibrations go back to normal and it starts behaving better.
@Ferrosan@bnsgeyer Could i have a faulty servo on the front right. Just before the jump into the air the copter appeared to be leaning on the front of the right skid with a slightly higher RPM. The reason for that thought is a few weeks ago while flying circuits the copter took a dive to the right for no reason then recovered.
@bnsgeyer@Ferrosan Think I have found the root cause of the problem. RC_Speed was set to 125 and I am using analog servo’s. I should have known to check this as the servo’s where buzzing al lot and I even burned one out a few months ago. RC_Speed now set to 50 and on the bench its much quieter.