Hi @bnsgeyer, see pictures:
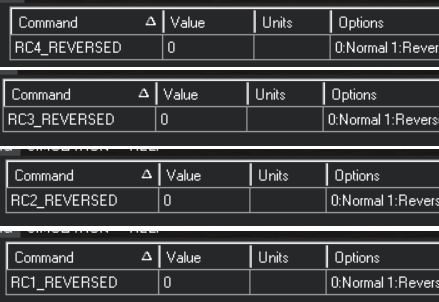

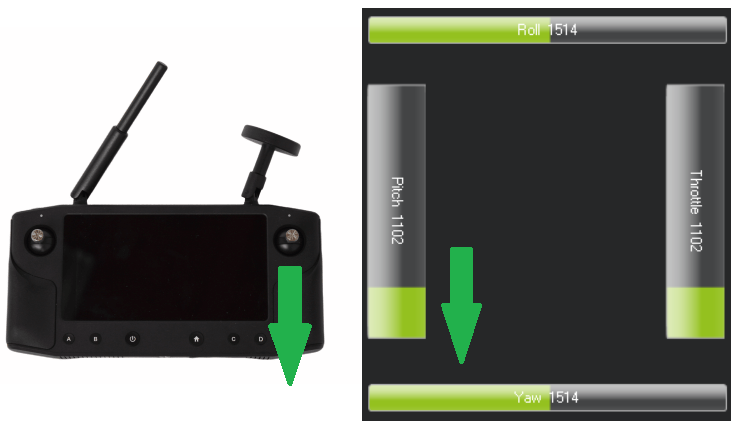





@Loren_DS Ok I made one mistake in the stick to bar movement. For elevator, moving the stick upward should cause the bar to move downward on the screen and moving the stick downward should cause the bar to move up the screen. So it appears that your elevator output from the transmitter is reversed to what ardupilot expects for the proper response. So I recommend that you set RC2_REVERSED to 1.
So now you should be commanding the correct response from ardupilot. To check that, you can set log_disarmed to 1 and collect data for your transmitter inputs to ensure it is commanding the correct response. So you can then power the aircraft and while it is disarmed move the transmitter sticks to verify the correct response is being commanded. I would only move the elevator to command pitch up(push it downward), move the aileron to command roll right, and move the rudder to command yaw right. Pull the log file and look at the ATT signals and verify the ATT.Pdes is showing pitch up attitude, ATT.Rdes is show roll right attitude, and ATT.YDes is showing yaw right. At that point, I am satisfied that everything going into the aircraft is commanding the correct responses.
EDIT: Perform the check above in STABILIZE mode
1 Like
How does the swash behave when you tilt the heli to the right ? does it move to the left ?
1 Like
Yes it does and opposite for elevator
It seems that the AP servo movement is correct, than all you have to do is to reverse the channel in the radio.

Loren -
When you were trying to perform the RCx_REVERSED settings, did it seem to work sometimes and not others? I think we have been experiencing this as well.
At our shop we typically do not want any reversing in the RC transmitter; we want the parameters to define things. This helps protect us if we choose the wrong Tx model or whatever. In fact, we have one model loaded for all of our helicopters, we normalize the rest in the AP settings.
But - RCx_REVERSED seems to be problematic in 4.0.4 and 4.0.5 - curious if anyone else has see this…
Hi @LoopZilla,
It may be that if it will work sometimes yes and sometimes not, although it is difficult to demonstrate.