Hi @ChrisOlson,
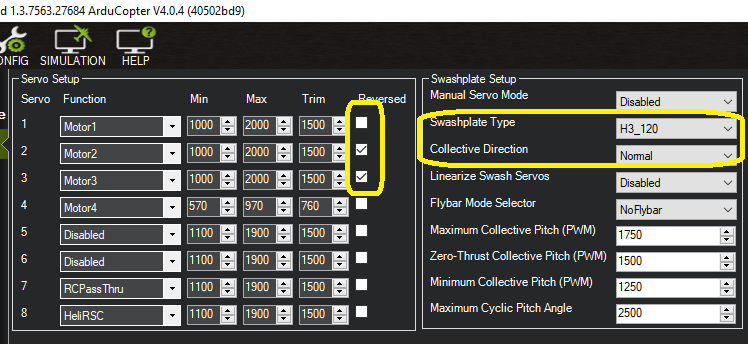
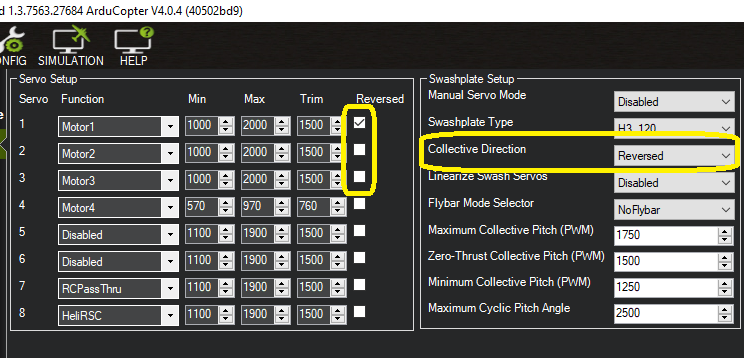
I have configured the CCPM swashplate H3 120º on my heli like this:
The sticks movements Aileron and collective is correct, but the pitch is inverted.
I’ve tried all the options to reverse the servo directions but there is always one of the movements (aileron or pitch) that works in reverse.I have fitted quite a few helicopters with CUBE and this is the first time that I have not found the solution.
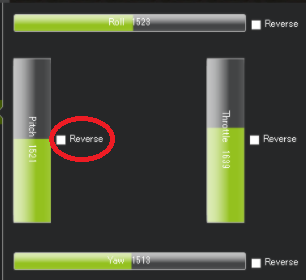
I need reverse the pitch with this function, but don´t appear:
@Loren_DS I don’t remember that screen being in the current version of mission planner. With 4.0 the heli screen was updated and there aren’t any sliders showing the servo output. My concern is that you are using an old version that is not setting the parameters correctly.
Edit. So I looked at your screen and I am guessing that is your rc inputs? Not sure if you should change them.
Please post a param file.
@Loren_DS you should not have to change the reverse on the RC input parameters. Does pitch make servos 1 and 2 go in the correct direction when you make an input. If it doesn’t and you have the proper response for roll and collective, you may have to reverse the pitch axis (elevator) in your transmitter. I think I have had to do that before. I will look at my transmitter when I get home.
Hi @ninja_zx11,
the parameter RCx_REVERSED only reverse the servo individually but what I need is to reverse a movement in which 3 servos collaborate at the same time.
Hi @bnsgeyer,
the H_COL_CTRL_DIR parameter not exist at 4.0.4, but i use “collective direction” at “swasplate setup”.
i am using HereLink as transmitter.
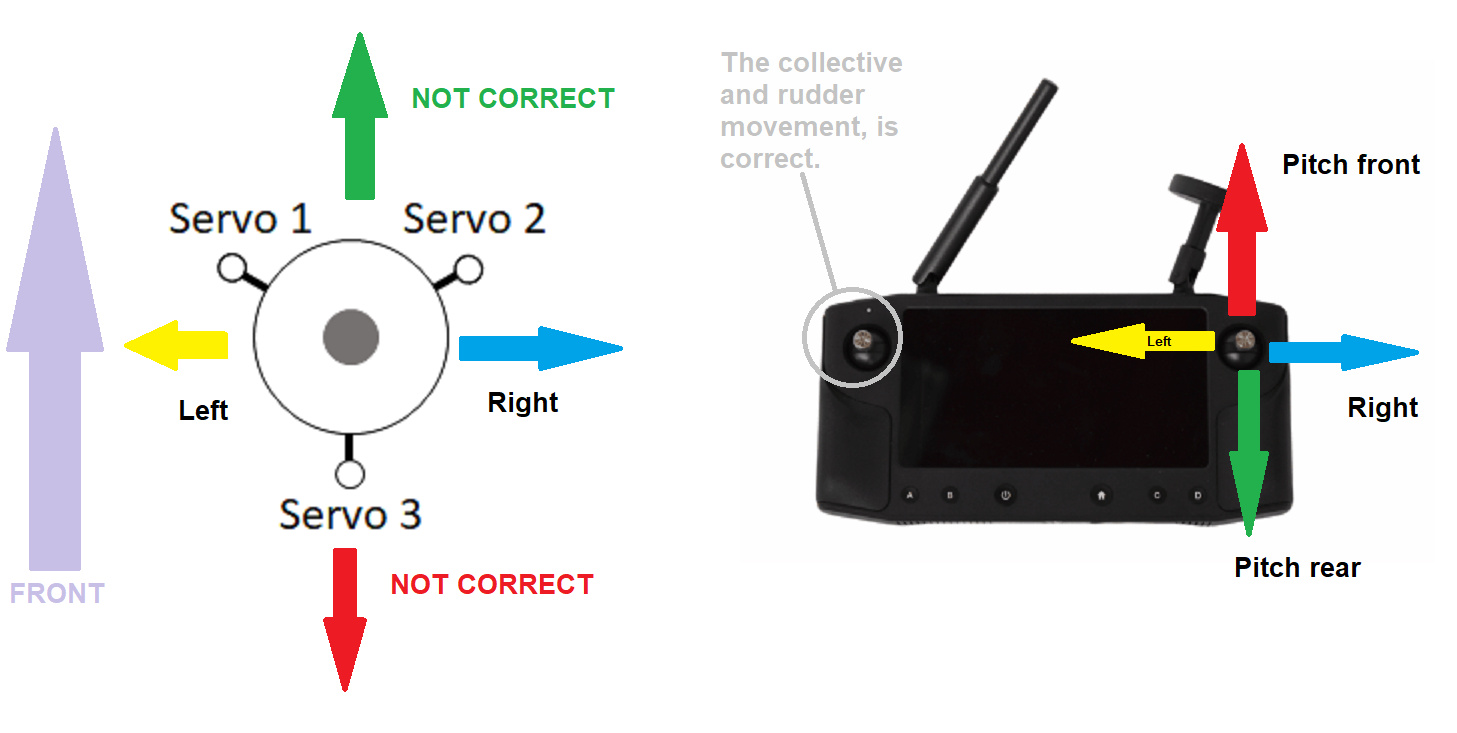
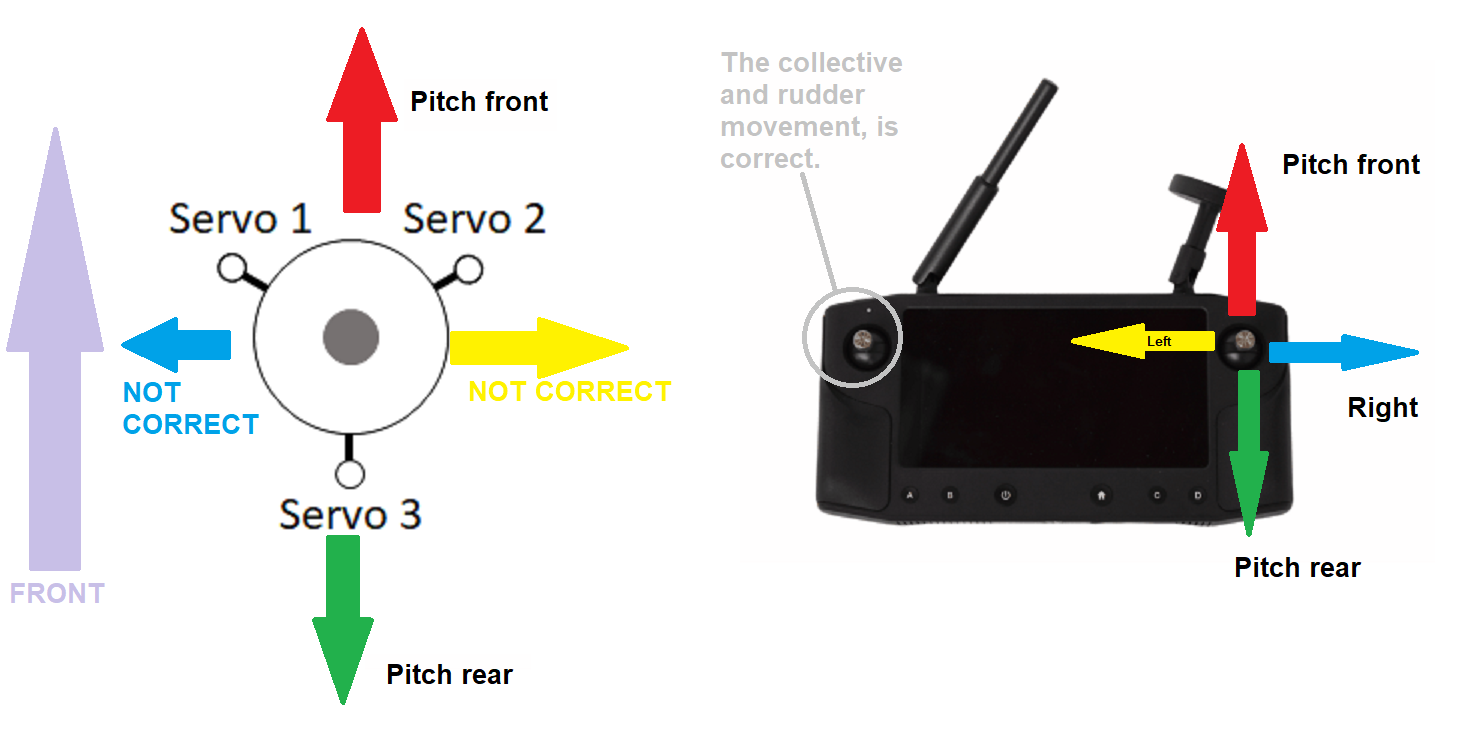
I’m going to try to explain myself with some drawings, because my English language is very basic:
This is the first setup: Collective, rudder and roll (aileron) movements is correct. Pitch (elev) movement is inverted.
I think your first setup is the correct one. I think you need to reverse the pitch(elevator) axis in your transmitter.
After doing that and verifying correct movement of the swash for all of your control inputs, you will want to verify that the controller’s inputs to stabilize the vehicle are correct. You can do this by setting the flight mode to stabilize. Leave the controls centered. Then tilt the aircraft so it is pitching up and verify that the swashplate it tilted forward (indicating that the controller is opposing the pitch up attitude). Do the same thing with the roll axis. Roll the aircraft right and the swashplate should be tilted to the left.
Hi @bnsgeyer,
I think the problem is my herelink transmitter, because in the version that I have there is no option to reverse pitch or any other channel.
I have tried with all kinds of transmitters (futaba, spektrum, Jeti, etc…) and it does work, because in standard transmitter you can invert the channels.
@Loren_DS, Had it once… Try swapping servo 1 and 2 connectors …
if all is ok, check also that the AP leveling is correct by tilting the heli and looking at the swash.
I think there is a difference changing direction on the radio as this will only change the pilot command, inverting the servo on the AP, inverts also the response for the AP commands
@Loren_DS please go into the config/tuning tab and under full parameter list and look up the RCx_reverse parameters to ensure that channels 1 through 4 are not reversed. Then go into the RC calibration screen and verify that the bars move in the same direction as you move your sticks. this would verify to me that your stick movements from your transmitter are in the correct direction that I expect when it is making inputs into the firmware. Please tell me if one or more are not in the proper direction. To clarify the directions pushing forward on throttle or elevator stick would cause the bar to go up screen and pulling back on throttle or elevator stick would cause the bar to go down on the screen.
Please post pictures of your servo to swashplate linkages for all three servos connected to the swashplate.