Dear All,
We witnessed a sudden event of Potential thrust loss in our quad copter. After flawless flight for 7 minutes there was a sudden increase of pwm to 1864 resulting this. Few more details along with logs.
Weight – 13.5 Kgs
AutoPilot – Pixhawk 4
Motor Details – T-Motor(MN605)
Previous to this flight we ran the flight without the camera attached with a weight of 12.5 Kgs. The flight was fine and we reached an altitude of 33 meters.
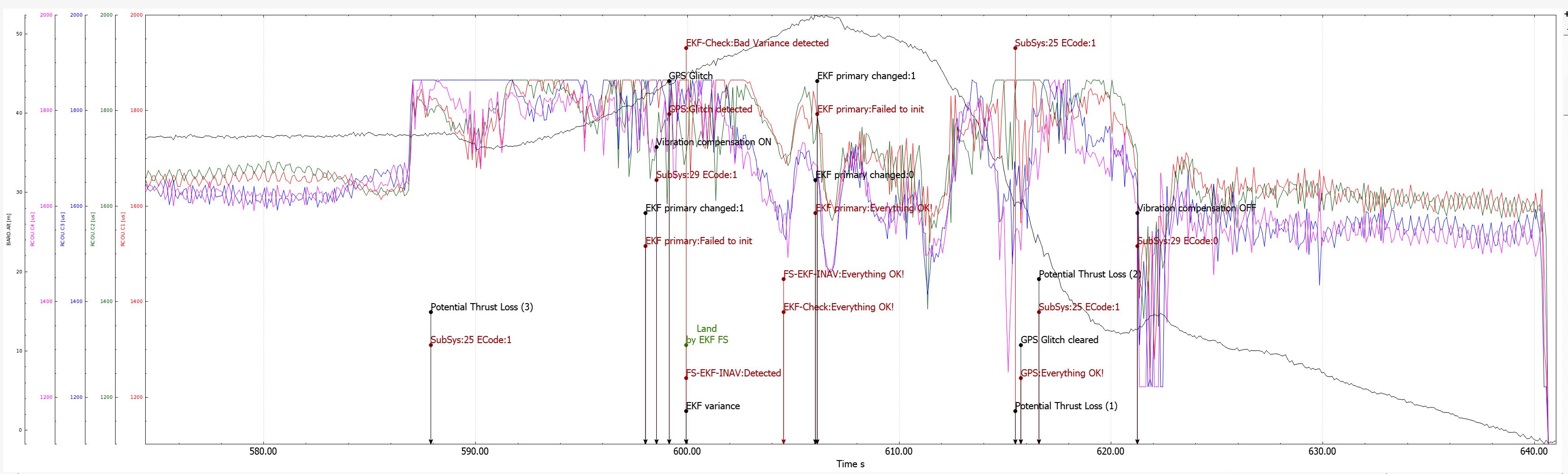
The next flight we reached a altitude of 32 meters and flew for 6.5 minutes without any issues. Post that we tried to increase altitude in PosHold and we saw it increasing very slowly up to 35 meters immediately we switched over to AltHold and increased the height up to 38 meters. During all this time it is important to note there were no huge gust of winds. Vibrations of X,Y was less than 10 , vibration for Z axis started to increase from 10 to almost peak of 35 during our ascent from 32 meters to 38 meters.
Checking the logs we can see the barometer height is different than the GPS height shown.
Please provide your valuable inputs.
https://drive.google.com/file/d/1P-hUF6fQSXRDVnhPRBVeFB2sFYCHdmFP/view?usp=sharing
2021-02-13 09-17-09.log.param (17.6 KB)