This is one of the reasons for ATC_ACCEL_x_MAX to exist - to limit rapid attitude adjustments so a payload is not damaged (think camera gimbal, or sloshing liquid), or so a copter doesnt damage itself trying to fight the extra inertia of a payload.
There’s also ATC_RATE_x_MAX and ATC_RAT_x_SMAX which hardly anyone ever uses.
You have ATC_ACCEL_P/R_MAX,8500 which is right on 60% of the normally calculated value for those sized props, 14500. I would caution against going this low compared to the normal value, or the autotuned value. We’ve seen where even small copters with good Trust:Weight can start to lose attitude control when this is lowered too much even when using the calculation for adding a payload:
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_R_MAX = ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_Y_MAX = ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
I would try around 10000 and see how that performs.
Background:
Prop size is what we initially base ATC_ACCEL_MAX on because otherwise we would have to know a lot more about a copter. Prop size gives us a very good starting point as it’s loosely related to takeoff weight and thrust to weight ratio and frame size. Autotune comes up with a value that suits the power/drive system.
With the Angle P values 6 and 4.5 - were that derived from manual tuning, or Autotuned values then lowered a bit?
I’d be tempted to increase those a bit to handle disturbances better - if wind really was a cause of your oscillations.
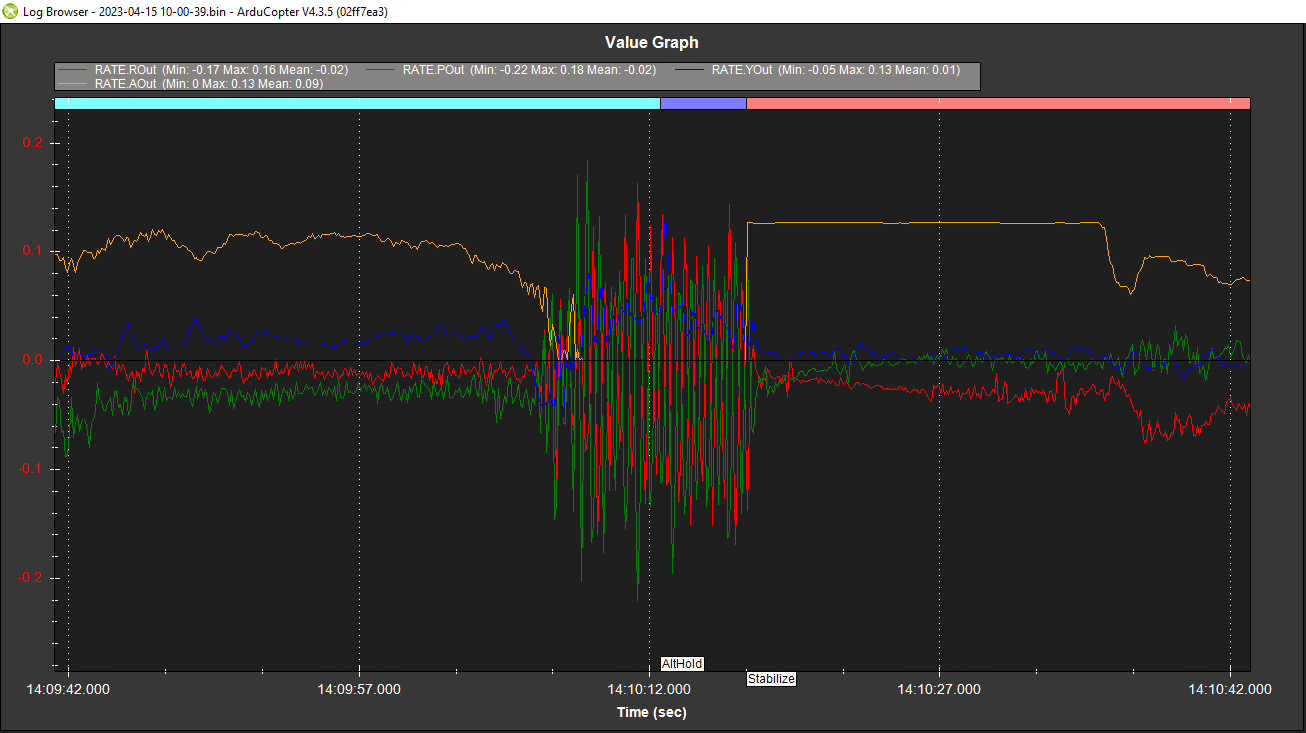
There’s a bit of the oscillation reflected in the position controller, but I cant tell which was first. The position controller doesnt seem to have bad oscillations or high desired accels or velocities. So it’s variations are likely just a symptom.
Never the less I’d probably lower these
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
and you already have a couple of the other lower-than-default PSC values I would suggest.
Carefully consider my recommendation to change to throttle-based notch filtering. I believe the in-flight FFT is not targeting the correct frequency.
FFT_ENABLE,0
INS_HNTCH_MODE,1
INS_HNTCH_FREQ,65
INS_HNTCH_BW,30
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_REF,0.125
INS_HNTCH_OPTS,4
INS_LOG_BAT_OPT,4
I’d be glad if someone could come up with a better explanation than just “wind” - but those accells are quite low.