Hi All,
During testing of the drone, we’ve experienced a sudden motor start without any arming command (either from the RC, which was disconnected or the MP).
The receiver was disconnected during the testing and PreArm check for RC conrtol was disabled (FS_OPTIONS = 0).
AP: V4.0.0
mRo Zero F7 controller
I saw this with AC 4.0.3 a few days ago, pilot was quick enough to hit the emergency motor stop switch. Just one motor started to spin up for no reason while disarmed and landed. Hardware is FMUV5
I’ll try to find a log but we may not have had LOG_DISARMED set.
We set the parameter to disable PWM outputs while armed, and put up with the beeping ESCs.
BRD_SAFETYENABLE,0 (no safety switch)
BRD_SAFETY_MASK,16368 (1 to 4 no output)
BRD_SAFETYOPTION,3
MOT_SAFE_DISARM,1 (this was 0)
We have not seen this with AC 4.0.2 but hardware was FMUV2.
EDIT: I couldnt find a log with this incident, we didn’t have LOG_DISARMED set at the time.
Hey @rmackay9@tridge
can you have a look at this?
I had similar experience in AC4.0.2 I guess. I had ignored it thinking I had messed up something and everything work fine after reconnecting battery. But it was scary because I had 15" folding prop on the copter. I was quick enough to hold the prop firmly and disconnect battery. As far as I remember only 2 props had tried spinning with low RPM. Now that I’m seeing multiple people have this issue, I thought I’ll mention it. This was without arming, just connecting the battery.
Warning safety…
I had a similar problem, copter 4.0.4 with black and kore cube carrier board esc alpha 40 tmotor, safety button disabled, and some engines started to turn, I was configuring an emlid as a gps, so I put the rdf900 radios in mode raw, after realizing this error I tested it several times with the radios in raw mode and every time when I was going to connect how the mp the motors rotated, after that I changed the radios to mavlink protocol, and the problem didn’t happen anymore, if I was going to make a assumption would say that it is something related to telemetry.
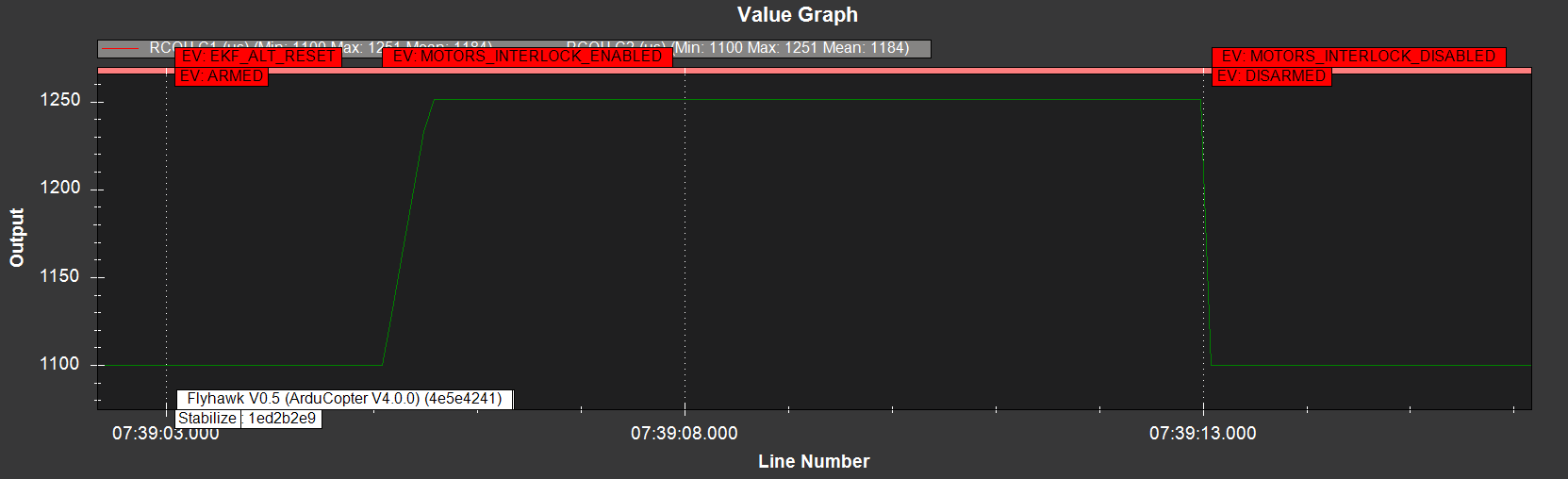
The only log I have to go on is the one from @RomanD. That log is difficult to analyse for a few reason:
the git hash isn’t from our repo, it is a customised code base in so me way (Flyhawk V0.5 (ArduCopter V4.0.0) (4e5e4241)) so we don’t know exactly what it does
it shows the vehicle was armed and that’s why motors came on. That version of the code doesn’t record the reason for the arming. The latest dev code does record the reason why a vehicle armed.
there is no tlog to show GCS interaction
So there isn’t much to go on.
For the people who had one motor spin up one common cause is temperature affecting PWM timing. If using PWM and MOT_PWM_MIN is too close to the threshold at which it runs then motors can run sometimes. This tends to cause an erratic motor spin.
If anyone wants to follow up on this then please provide a lot more detail.
how could i help? I believe that my logs have not recorded anything, because the board was unarmed and the safety swicht was not pressed, basically it was connected to the battery. I noticed that telemetry may be related, because the engine spin only happens when the connection with the mission planner is being made. another point I noticed that it only happens when the sik radios are configured in raw mode, I returned them to mavlink and the problem stopped
Unfortunately, I haven’t been able to reproduce it. No log either as it was never armed and GCS wasn’t connected as it happened right after I reconnected the battery for the second or third time, if I recall correctly. The firmware is unmodified in my case. I’m indeed using PWM, but I haven’t touched MOT_PWM_MIN. Here’s my settings.
MOT_PWM_MIN = 0
RC3_MIN = 1094
Is there any downsides to manually setting either MOT_PWM_MIN or RC3_MIN to, say, 1000 (or whatever the value way below ESC threshold) to avoid accidental spin-ups in the future?
Please check the memory card and make sure it’s tight. I had the same issue a few days ago but i was working with BLH dshot… Regarding arming that seems to be programmed into MP and bypasses the arming switch check arming in the config, . A side note is when you change from esc’s in a normal state then go to Dshot in a esc calibration scenario you can get some motor power up events.