https://drive.google.com/file/d/1lRQu7o8BseXxbfYAm6_lvbeQNbGLBx1Z/view?usp=sharing
Hi all,
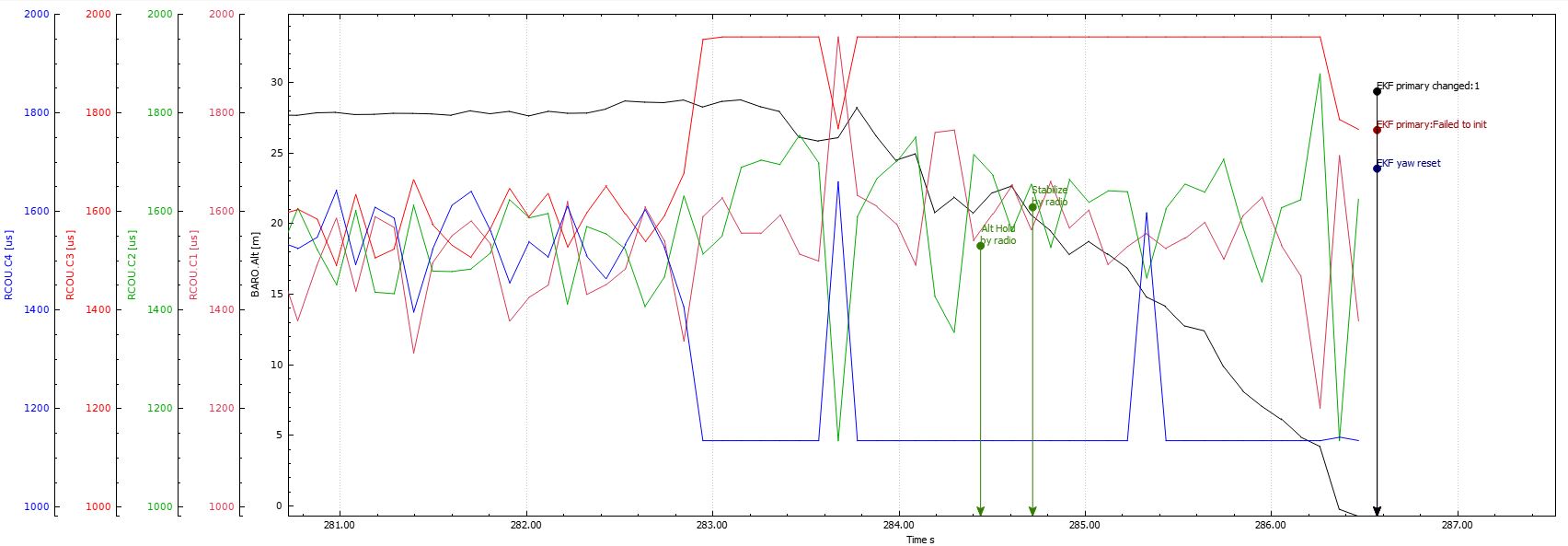
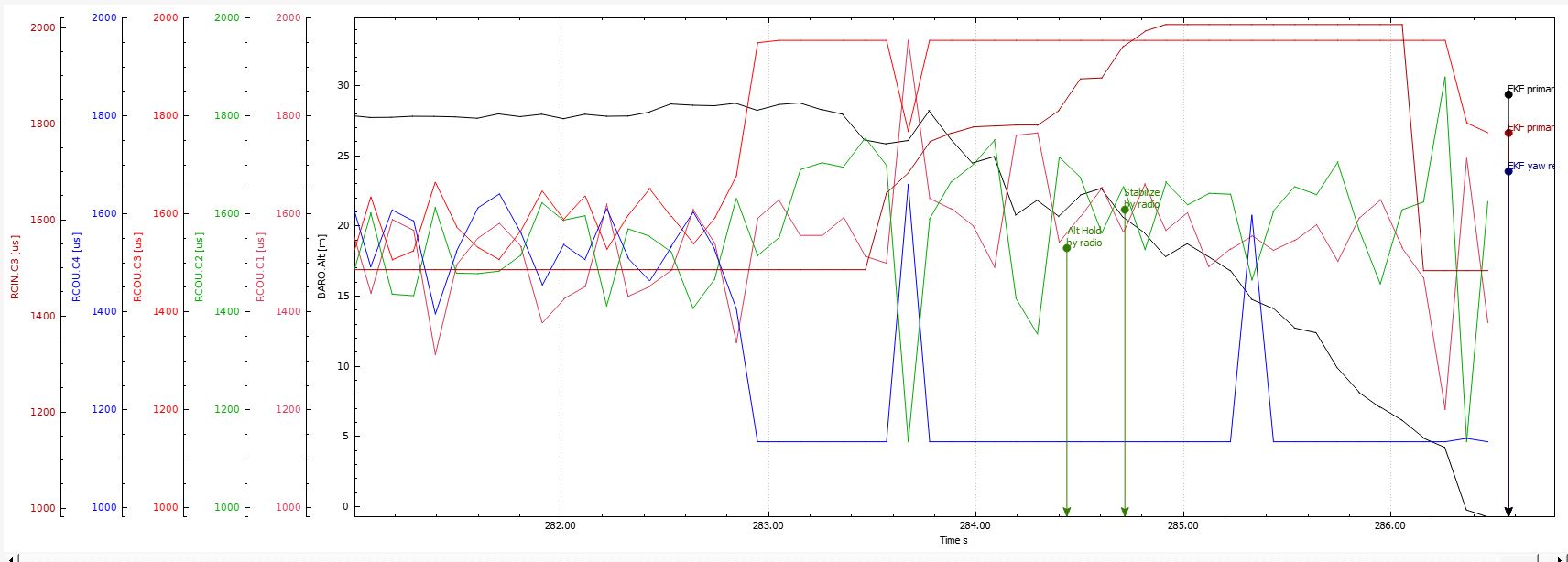
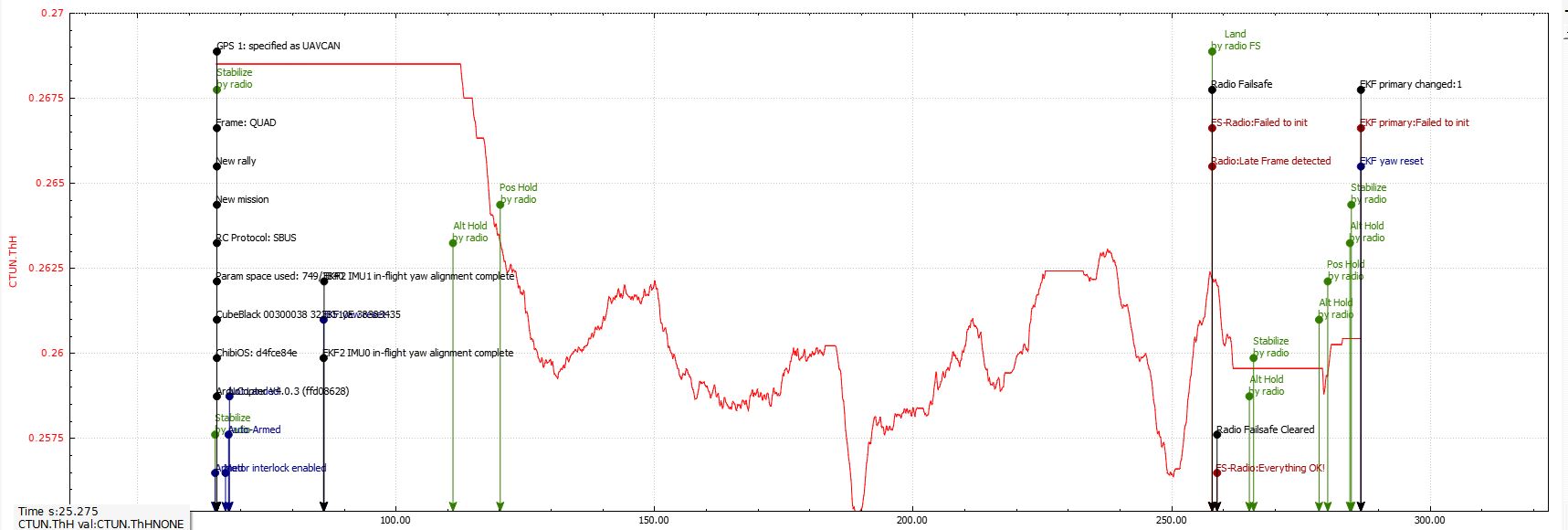
Recently we were testing our newly assembled 650 mm quadcopter with 14-inch propellers. The motor used is JFRC-U2820 420kv. With a take-off weight of 3 kgs, we were getting a flight time of approximately 40 mins at 40% throttle for hover. After testing it in hover conditions for over 2 hours in multiple flights, we were testing it in forward flight and also trying to move it around but suddenly we lost control of it. The quad started to yaw and flip and fell from 60 feet in height. It took multiple flips and multiple 360 yaws before crashing.
We are wondering what could have gone wrong and the reason for such a catastrophic experience.
We did, however, the motors and ESCs after the crash and there doesn’t seem to be any problem with them.
I request the experienced group members to leave their comments on the problem.
We are new to the world of pixhawk and are excited to learn more about it.
I am attaching the flight log for your reference.