After completing a photogrammetry mission, the drone return to home position in LOITER mode, the drone starts spinning uncontrollably and crashes.
https://drive.google.com/file/d/1WrRUN6biu0HwRmWrF5aTS7BdLh4GNIPo/view?usp=sharing.
Thank you
After completing a photogrammetry mission, the drone return to home position in LOITER mode, the drone starts spinning uncontrollably and crashes.
https://drive.google.com/file/d/1WrRUN6biu0HwRmWrF5aTS7BdLh4GNIPo/view?usp=sharing.
Thank you
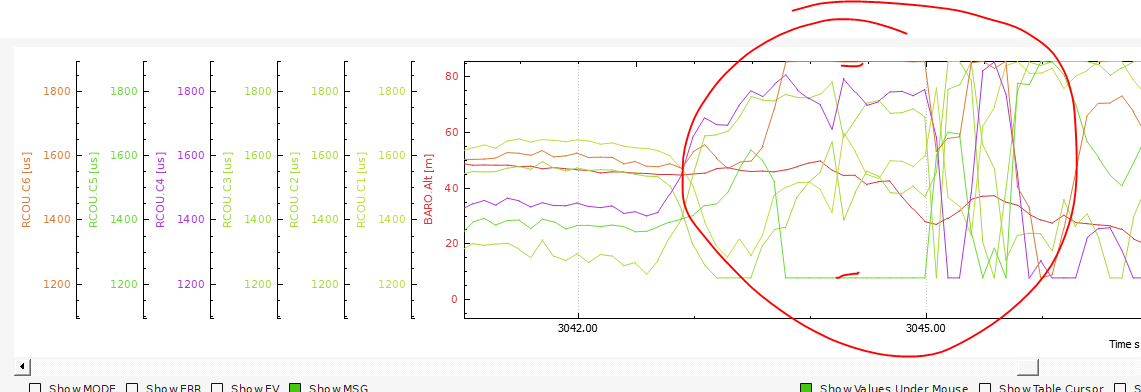
You lost motor6. That caused the opposite motor to throttle down. Then the remaining four motors were not able to keep altitude. It did not crashed but had a more/less controlled descent while turning.
Thank you very much for your time.
I agree that’s what it looks like, but from that point on they start to saturate all the engines in positive and negative.
If you notice, in flight you see a big influence of the yaw.
We have a suspicion that one of the motors has turned on its axis in mid-flight.
We would not want this to happen to any of our other aircraft.
Do you think it could be due to a failure of the AP or just an assembly failure as we think?
It is definitely mechanical or electrical failure.