Hi all,
Following my issues described here, I made some test with the quad standing still on the bench and pre-arm logging enabled.
I’m seeing strange behaviors for IMU.GyrX and IMU.GyrY that manifest into huge HUD drifts. IMU.GyrZ, IMU2.GyrX, IMU2.GyrY and IMU2.GyrZ look good.
Here is what I see at random times. This are pre-arm data with the quad standing still on the table:
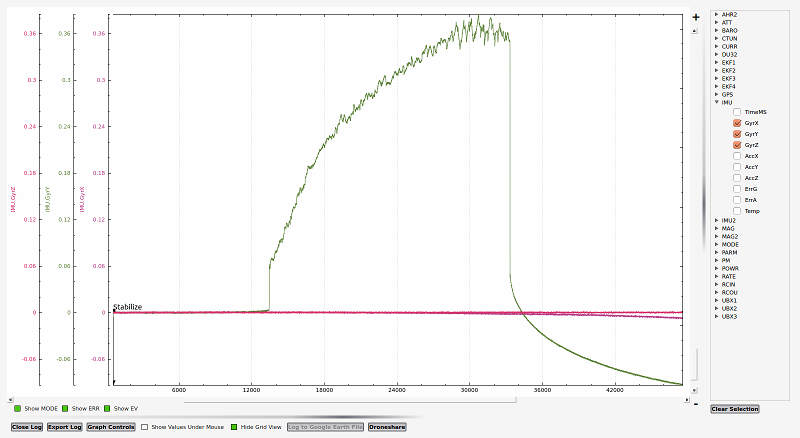
When this happens, the HUD drift a lot (up to more than 45°) and I think that flighting in these situations will not be a good idea.
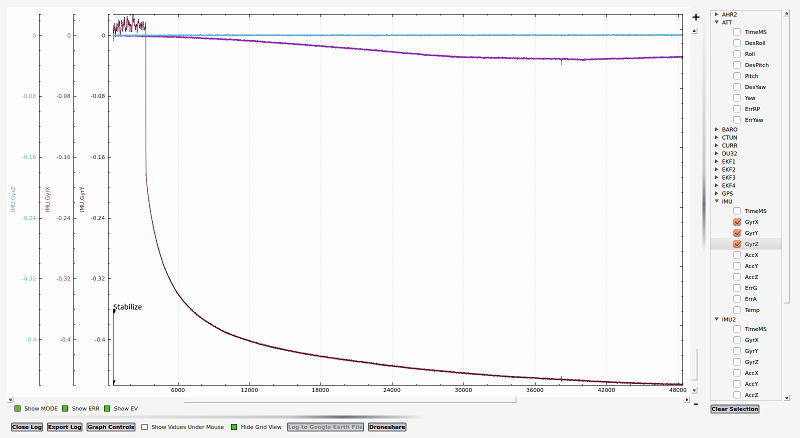
Sometimes, there is no suddenly changes in the values but a (fast?) regular drift of the values:
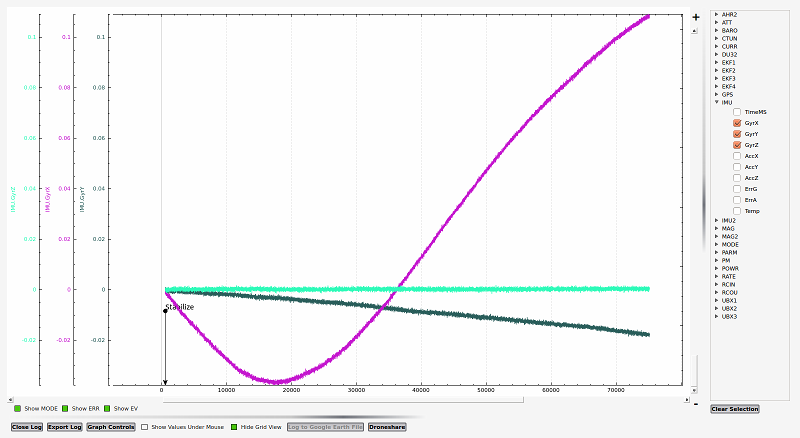
In this case, the HUD drift only a bit (few degrees) and I think in this case the software is able to adapt to the bias.
Do you also see this kind of drift in IMU.Gyr? Is this normal? Do I have bad hardware (it’s an ebay clone)? Thank you
My logs are available here.
Regards,
Cyril
 No more gyro drift and leans during flight. Both IMU report consistent data.
No more gyro drift and leans during flight. Both IMU report consistent data.