Using the Cube Black using AC 4.0.2
Here we are running 3 FCUs at the same time, but have FCU2 and 3 in standby mode for the entire auto flight.
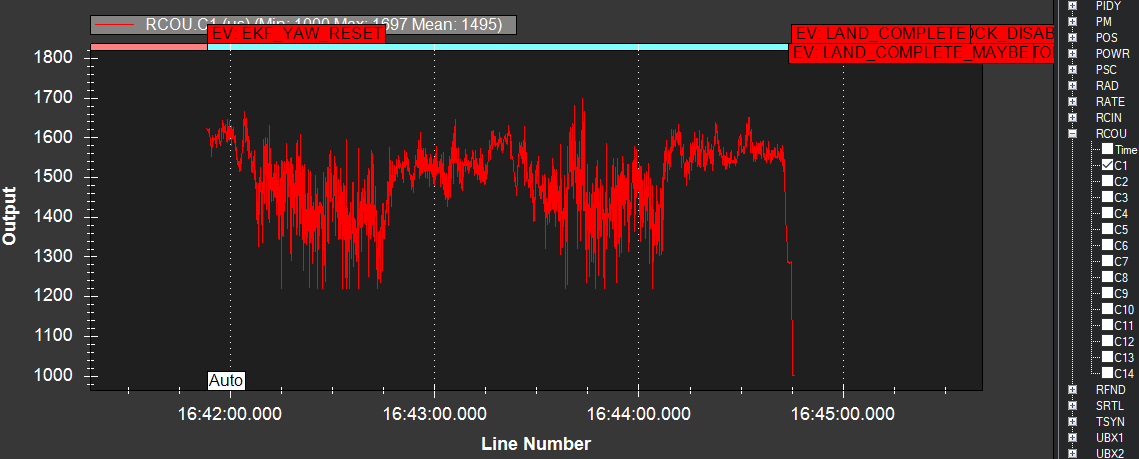
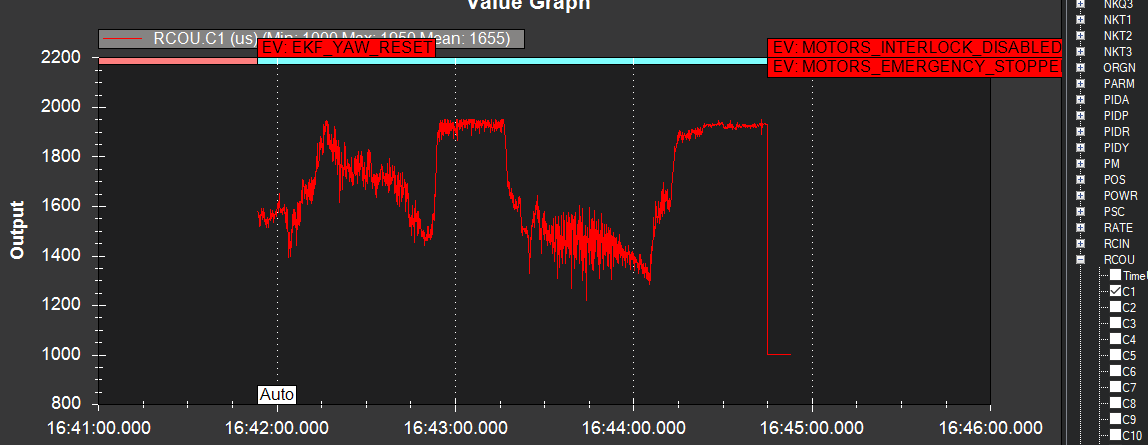
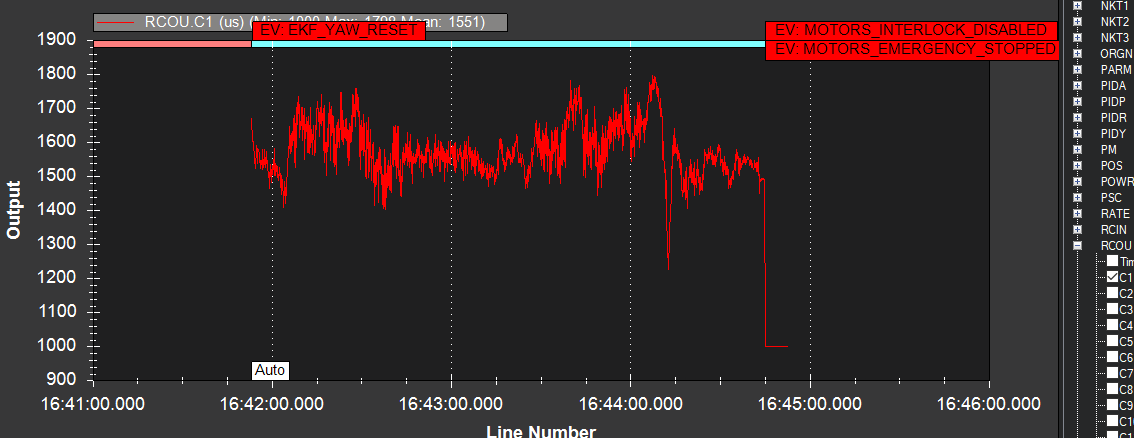
As you can see at the end of the flight fcu1 registers a land complete, whereas fcu2 and 3 do not. They only disarm after the kill switches are used. This seems to be happening on all Auto flights/RTL/Land.
Is this meant to be happening, or would they all be expected to disarm?
Since the PWM output is high, on switching while grounded after a mission, the aircraft just takes off rapidly.
I have also attempted to call the disarm service, but has been declined by FCU2 and 3. I guess because it doesn’t think it is in the landed state.
I would expect it not to disarm on an inactive FC. It is possible, since the inactive FCs have no feedback, that they would disarm in flight if the LAND_COMPLETE conditions are met. I have had this problem before without using Standby Mode though.
I think, landing detection during Standby Mode is not very senseful. I’m afraid that landing detection could have false triggers on an standby fc due it’s lack of feedback.
I sometimes had this problem in former times with backup FCs before Standby Mode.
Okay, thanks both for your feedback would it be worth considering if the flying fcu is landed to the turn off standby on the other 2 FCUs so they can then detect the landed state? In my situation?
 would it be worth considering if the flying fcu is landed to the turn off standby on the other 2 FCUs so they can then detect the landed state? In my situation?
would it be worth considering if the flying fcu is landed to the turn off standby on the other 2 FCUs so they can then detect the landed state? In my situation?