Hello i,m not new in arduplane but i,m new in auto mission and i,m having troubles with the speed because is not constant change alot?
It,s posible to do that without airspeed sensor or it,s mandatory
It is marked to use the speed at 19ms but it varies a lot
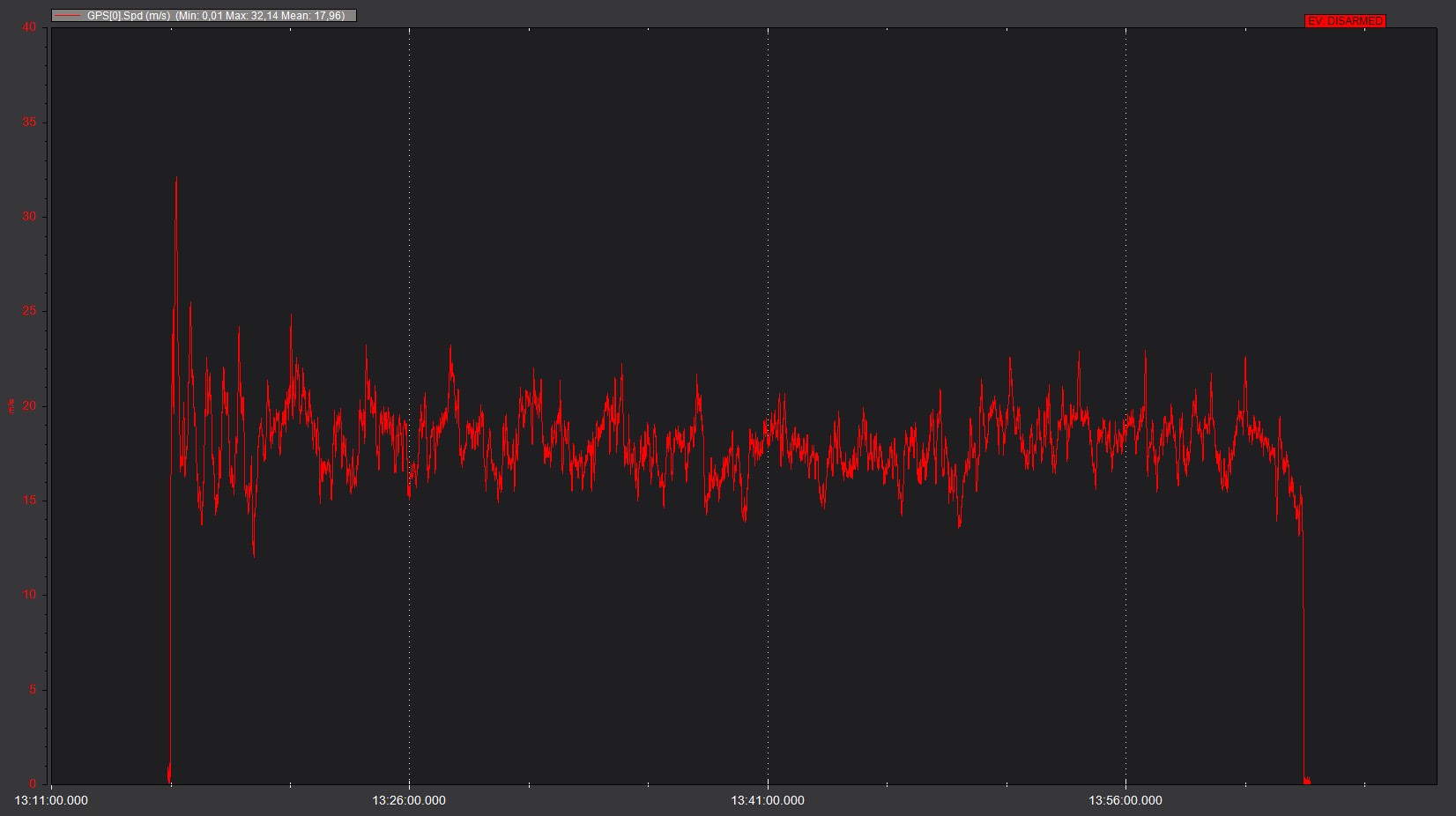
GPS speed will just be the speed over the ground. Even if your airspeed is perfectly locked on, the GPS speed will change depending if you are going upwind or downwind or crosswind. Looking how rhythmic those changes seem to be I suspect that might have something to do with it.
Here’s an example from a flight I did yesterday. This is during the loiter orbit after takeoff. The synthetic airspeed is stable, but the GPS speed goes up and down as the plane goes in and out of the wind.

1 Like
so to have a constant speed for mapping i need a airspeed?
For mapping, especially with fixed wing, you want to set your camera to trigger on a fixed distance, not time. So your ground speed shouldn’t matter as long as the camera is capable of the seed and light conditions.
Yes i agree but to set up the camera you need more or less an stable gps speed because if you set up the shutter speed for 60 km/h you need to fly at this speed more or less
If the camera is triggered by the GPS distance the speed shouldn’t matter for the coverage. 55km/h or 65km/h, the camera should still shoot every 200m. (or whatever your numbers are). Then the issue will be if the camera can take the picture fast enough to get the image without blur, and process it fast enough that it’s ready to take the next picture.