We tried to find out what it can cause the issue. Vibration, Barometer, magnetomer / compass.
Finally we improved all the sensors data with specific measures:
Compass:
the high current distribution board was moved out from center to one side (Tarot X4 frame)
All the high current cable were twisted (or at least lead parallel)
internal compass was disabled.
Barometer:
finally the barometers were moved back to the center (earlier it was on the brink of the frame - because of compass)
got a temporary cover (see pict)
Vibration
we tested a lot; finally the rubber was removed from under the motors, but the CUAV damping plate was kept (the VIBE was decreased from 50-60 to 5-10, ACCX from 4 to 1)
Now we see some remaining issue:
The wind has a strong influence on the altitude measuring (somehow the rangefinder is not used) very last log (Rangefinder showed 3–>5m Alt change, while barometer showed a static 3m. - increasing wind)
I inserted some pictures and some logs to the upper mentioned link
Terrific Vibvrations. Look log analizer: cras1
Log File C:\Users\papo\AppData\Local\Temp\tmp8D8.tmp.log
Size (kb) 25379.111328125
No of lines 291118
Duration 0:30:09
Vehicletype ArduCopter
Firmware Version V4.0.3
Firmware Hash ffd08628
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD - Test: Compass = FAIL - Large change in mag_field (1020.38%) Max mag field length (2420.13) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: FLT_MODE FENCE GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given) Test: IMU Mismatch = FAIL - Check vibration or accelerometer calibration. (Mismatch: 2.71, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1353, 1377, 1341, 1360]
Average motor output = 1357
Difference between min and max motor averages = 36
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - Unknown mode in TestPitchRollCoupling: BRAKE
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Log File C:\Users\papo\AppData\Local\Temp\tmpF97A.tmp.log
Size (kb) 3446.0458984375
No of lines 31844
Duration 0:02:04
Vehicletype ArduCopter
Firmware Version V4.0.3
Firmware Hash ffd08628
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (9.16%)
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = FAIL - ERR found: GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = GOOD - (Mismatch: 0.18, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1093, 1086, 1086, 1091]
Average motor output = 1089
Difference between min and max motor averages = 7
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - Unknown mode in TestPitchRollCoupling: BRAKE
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
The difference between the 2 flights of today is that the total weight was increased from 7.2kg to 9kg.
I do not understand one issue: The vibe parameters are ok (even the Vibe X is the highest) while the ACCY increase out from the ±3 range to ±5 range. (ACCX and ACCZ remains fine)
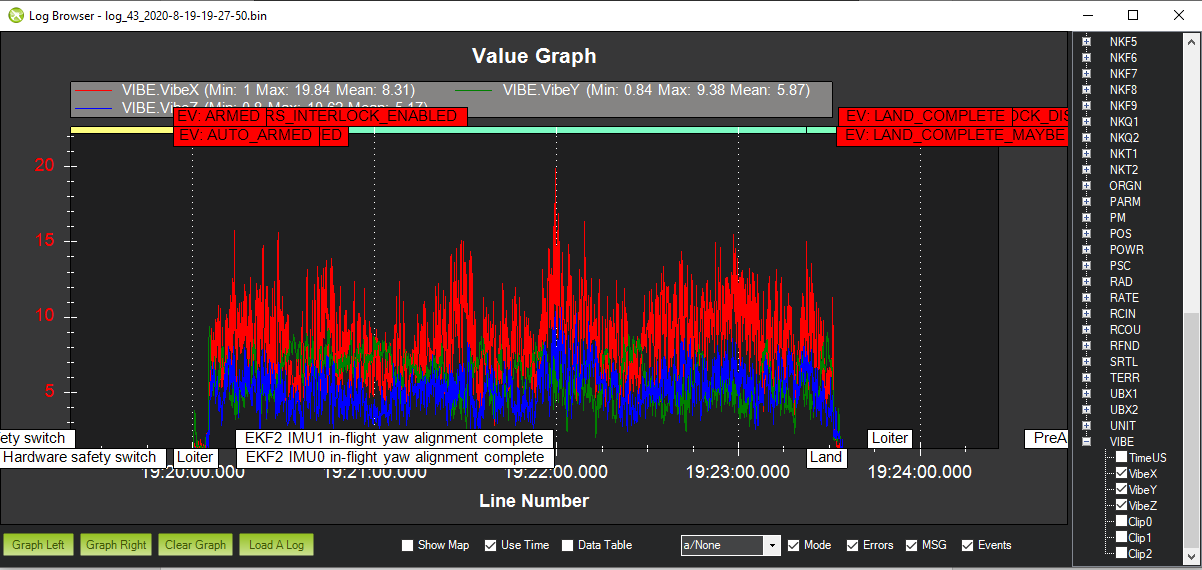
So the vibration is increased according the ACCY parameter to an unacceptable range, but according the VIBE parameters it is still fine (much below 30):
The ACCY gets wrong at last flight (total weight increased from 7.2kg to 9kg) but all the VIBE is really fine (much below 30 - the VIBEX is the biggest - in peak ~ 20)
it seems the rangefinder is not used for altitude sensing - it works, I can see the values, but according to the behavior it seems only barometer is used (decreasing temperature ==> BARO.ALT shows -1m altitude after landing, another issue: stronger wind ==> decreasing physical altitude ~with -0.5m - while the RFND.DIST is stable)
earlier experience - virtual fence - when we had a flight much earlier with higher speed and we reached the virtual fence it was like a hard physical hit not a smooth slow down - currently I’m not brave enough to retest )
I would appreciate some help.
Thanks a lot,
Szabolcs
Sorrry another question. Which tool are you using for log analysis? I’m using the standard logbrowser in mission planner, but the event and error display is much clearer on yours:
I couldnt see anything really wrong with that last log you posted. Yaw wasn’t tracking as well as it might.
PIDs look very standard, you could try these a bit lower:
INS_GYRO_FILTER,18
INS_ACCEL_FILTER,18
and this a bit higher:
ATC_ACCEL_Y_MAX,22000
and run through the Autotune process, or post a new .bin log
Hi all, finally i applied all the suggested changes. Furthermore i balanced the motors with assamled props. (With 22" it is not a life insurance activity) but finally the vibration went to really low 5-10 in vibe)
We had a very stable flight 15 minutes.
And next flight we completely crashed.
No reason at all.
The drone turned over. First i thought esc or motor, but all works fine even after the crash. Cuav v5+ seems problemaric. It works but hot. Memory card is crashed completely no logs at all.
Even put it into a computer it started to burn phisically.
Currently no guess what could happen.
The 2 power source of cuav gives good voltage 5.23 and 5.26V so overvoltage less likely even after the crash.
Dont know what coukd happen. It was really stable before the crash.
Any guess?
 )
)
 at all.
at all.