My angle limits work fine in AltHold
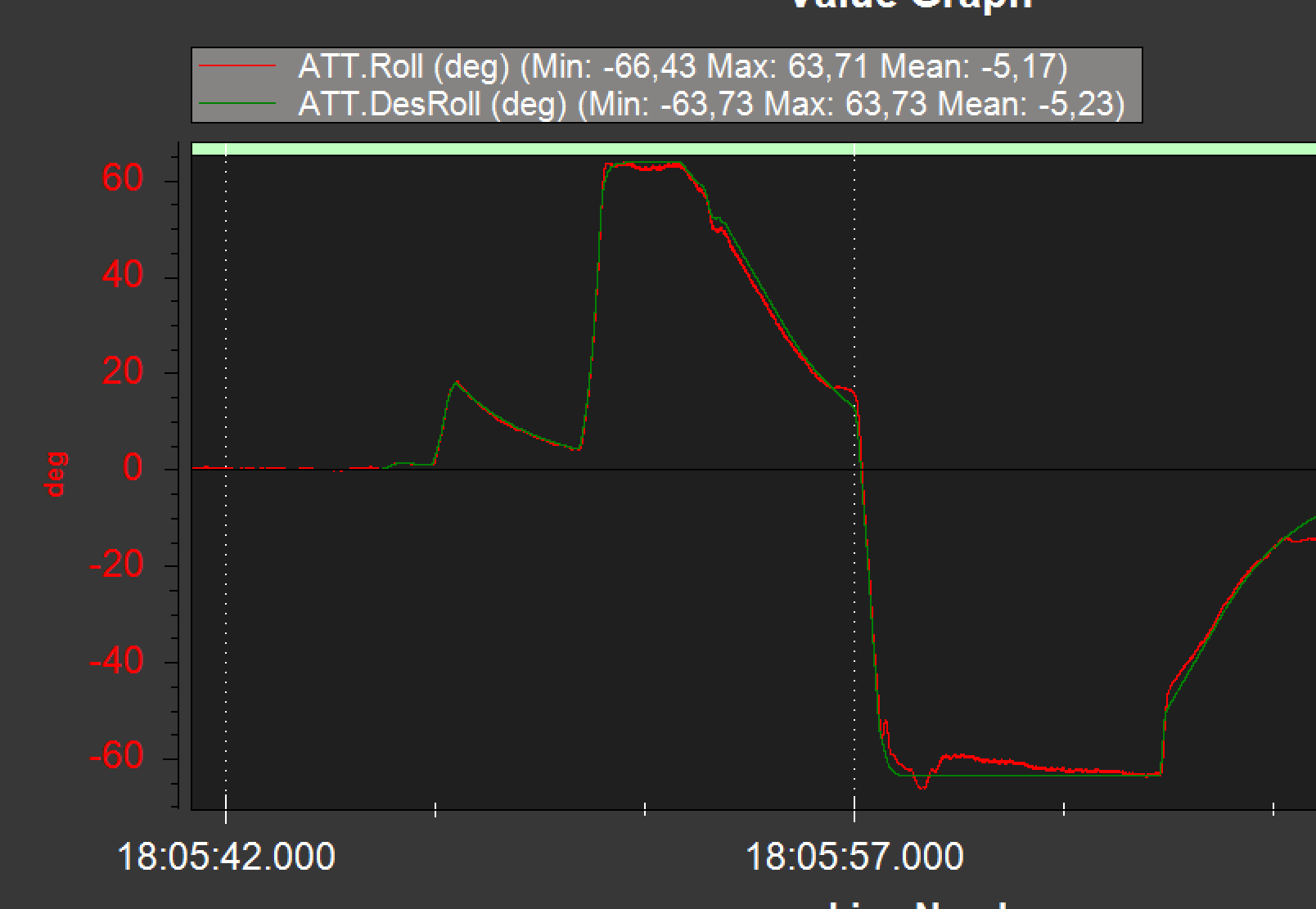
But I noticed In Sport Mode the Angles go to 63.73 max. Even though I have the trainer function activated.
How can I limit this to something more reasonable?
My angle limits work fine in AltHold
But I noticed In Sport Mode the Angles go to 63.73 max. Even though I have the trainer function activated.
How can I limit this to something more reasonable?
Are you talking about Acro Mode? Sport mode doesn’t have a Trainer function. And in Acro the default trainer mode (2) is angle limited by Angle_max.
I am concerned about SPORT MODE.
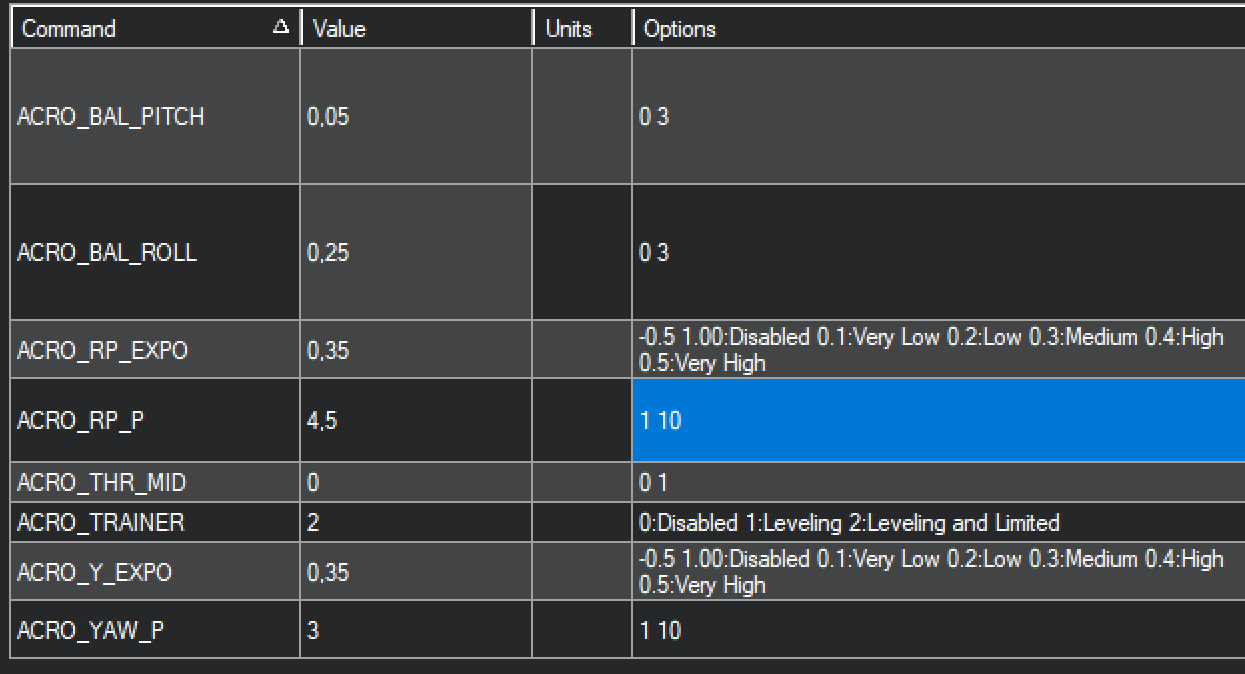
The ACRO_BAL_* parameters do have effect in SPORT MODE and slowly level the copter, also visible in the graph above. So I thought that was connected to the trainer function.
Anyways I thought SPORT mode is a bit “safer” than ACRO mode, since it maintains altitude. However, it allows angles at which the copter cant maintain its altitude any more, therefore making this mode actually less predictable and more dangerous than ACRO.
The wiki mentions an angle limit of 45deg
https://ardupilot.org/copter/docs/sport-mode.html
edit: A link to the log if it helps
No trainer function in Sport. Also, I wonder if the Wiki is correct regarding those parameters for Angle limit as they are rate parameters. Easy enough to test in the Simulator.
Sport is not a popular mode. I think most flyers try it once and find little value.
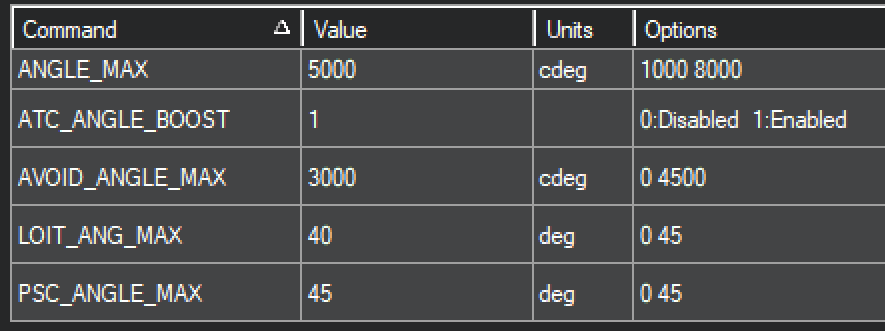
I tested this in the Simulator and the ACRO_BAL_ROLL/PITCH parameters do exactly what they say they do by controlling the rate at which is returns to level. No effect on Max Angle achievable which was about what you reported ~60°. However the ANGLE_MAX parameter does seem to have an effect. When set to 45° it pitches ~60° and when set to 20° it pitches ~30°. I don’t know why this is.
Perhaps because no one uses this mode the docs have been left behind. Or there is simply something I don’t understand 
@hwurzburg What do you think Henry regrading the Wiki docs?
I will have to defer to @rmackay9 to comment on what is supposed to happen in SPORT MODE, I have never used it myself…if something needs expansion or clarification then I can do that
From the description in the Wiki I thought this mode has some appeal: FPV flying in AltHold is jerky and I am not really comfortable to fly a big/expensive copter 30 minutes in ACRO.
However the first time I tried SPORT the sublete drop in altitude at speed lead to quite a serios crash. So I did further reading and testing and after what I found there would have been no way to anticipate this crash, thats why I’m posting here.
I think either there is no angular limit: Then there should be a hint in the Wiki stating that and that it holds altitude only at angles it is able to. However, I don’t know who would want that. In that case it wouldn’t be any safer than ACRO and ACRO would actually be more smooth and predictable.
Better would be limiting the angle to ANGLE_MAX. Then the AltHold component of SPORT MODE would be valid without exception for a copter that is properly set up.
However the tested current limit of 63.73deg seems arbitrary and results in a mode that’s not fish not meat and potentially dangerous due to a lack of predictability of the behaviour.