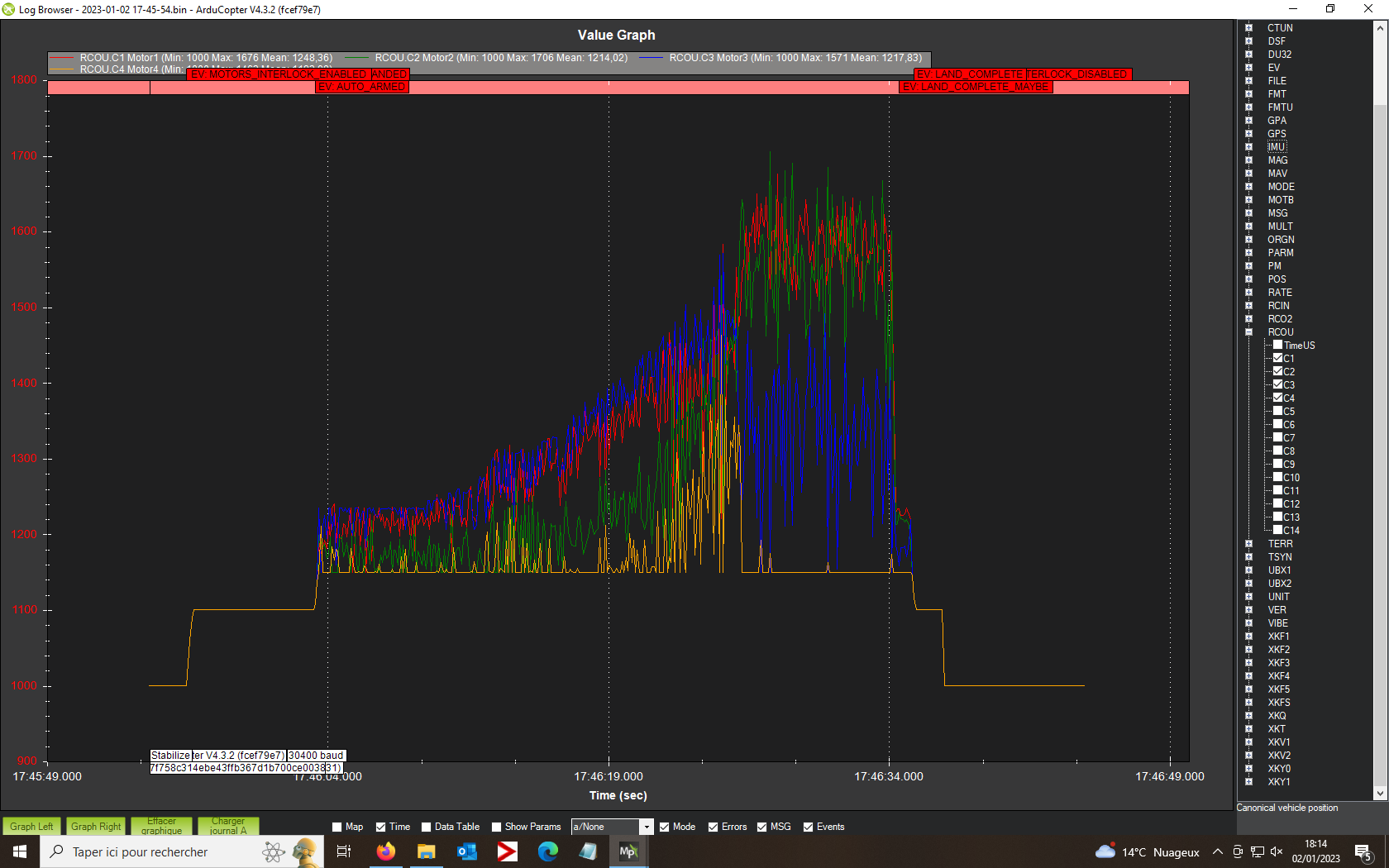
My quad continously spins on the yaw axis. As soon as there is enough throttle power to lift the quad, it spins in an uncontrollable way (even if I counteract the yaw on my RC it doesn’t seem to take any effect)
I tried many different compasses configurations that all reproduce the same effects.
Here are a few config infos:
Holybro Quad X S500 frame
4x20A ESCs
880kv Motors
Raspberry Pi 3 + PXF Mini board
APM Arducopter 4.3.2
Telemetry 433Mhz
1 Externa integrated GPS (UART) + Compass (I2C)
Board orientation Y135
External GPS orientation Y315 (auto detected Y225 during calibration → however the heading shown on map is correct)
Here are my quad parameters as well as logs… In case you can please support.
I have many development hours on raspberry pi based APMs but never encountered this issue
Thanks for the support! I am a bit short of arguments to get this one in the air…
Guillaume
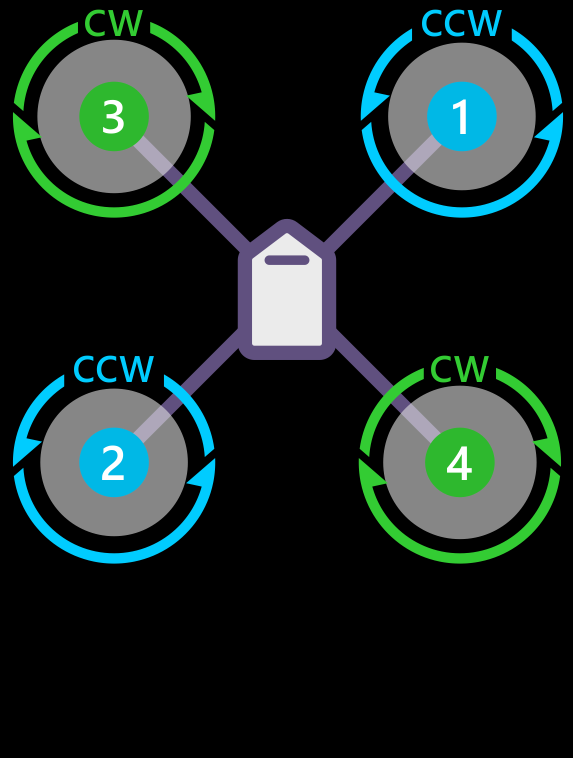
Damned, I was sure I checked already several times but it seems the issue is as simple as you say.
As I changed orientation during assembly I think this is were I got it wrong…
Thanks for the kind reminder
Guillaume
Glad that was that simple
Dont worry , it happens to most of us and surprisingly it is hard to believe how much your brain can fool yourself believing that all is ok and after double / triple checking it is not