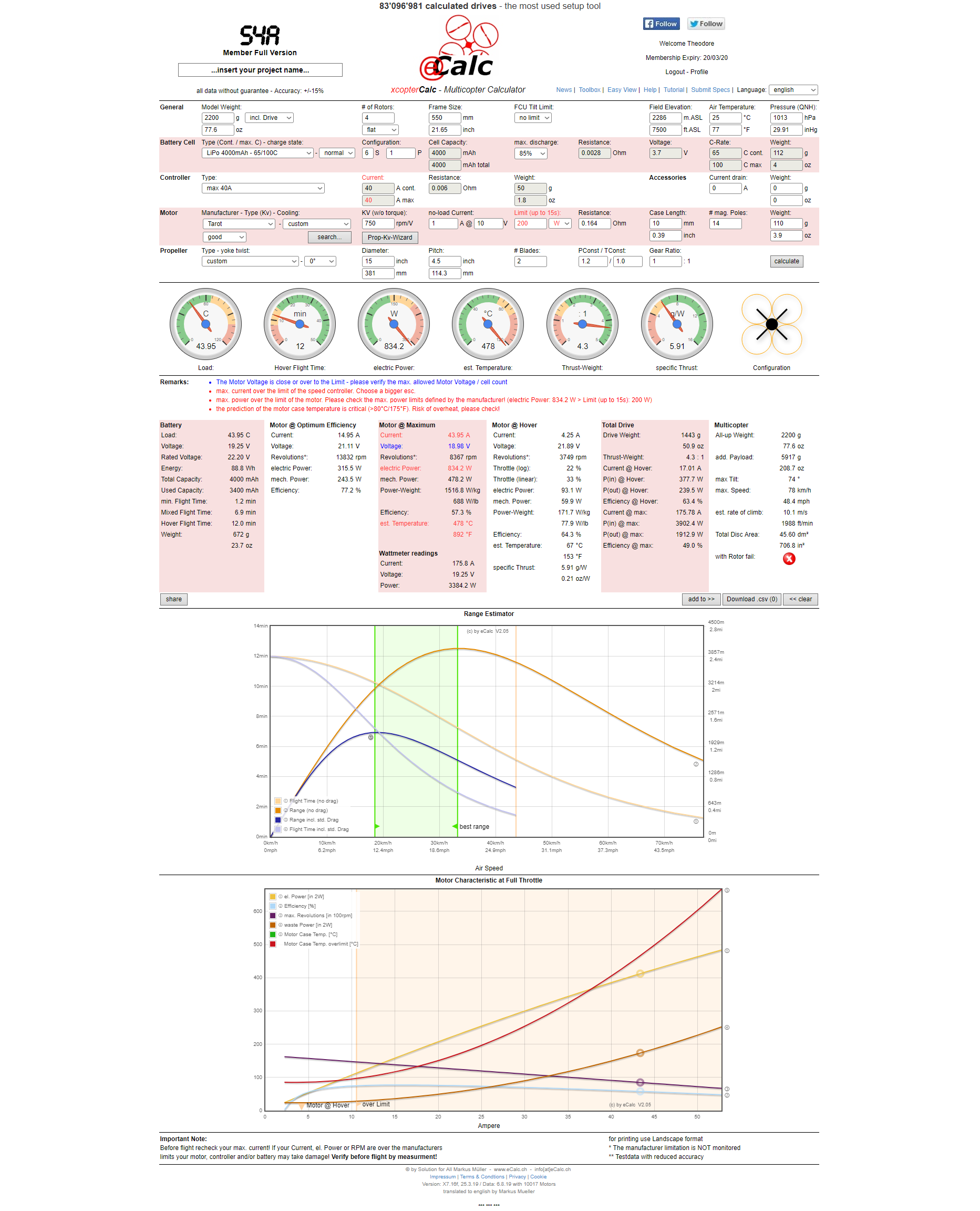
I cant find enough information on those motors for this to be reliable. I took a guess on the battery size. I had to make some assumptions, particularly with the max power of the motor (So just ignore the “map power over the limit of the motor” for now - This has little to no impact on hover throttle. I am pretty sure you would be over the limit, but I cant find any data on these motors, so we cannot rely on my 200W assumption which is likely low):
The main take away here is that your 750kv motors with 15" props are no good. 33% hover throttle is not good. This does not provide enough “under”-head (i just made that term up - the opposite of overhead, haha) for this setup to be controllable.
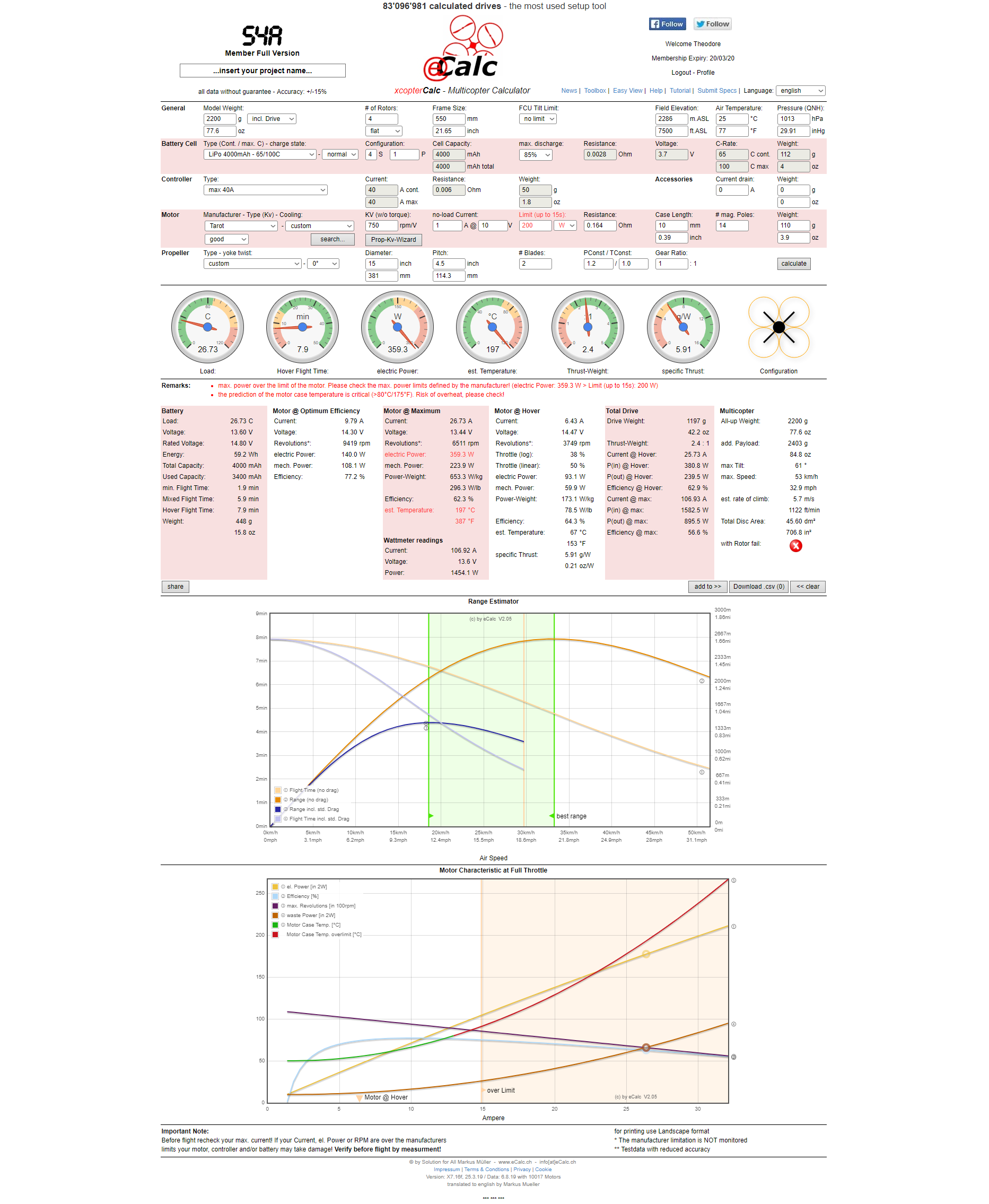
Dropping down to 4s is what it will take to make these 750kv motors work:
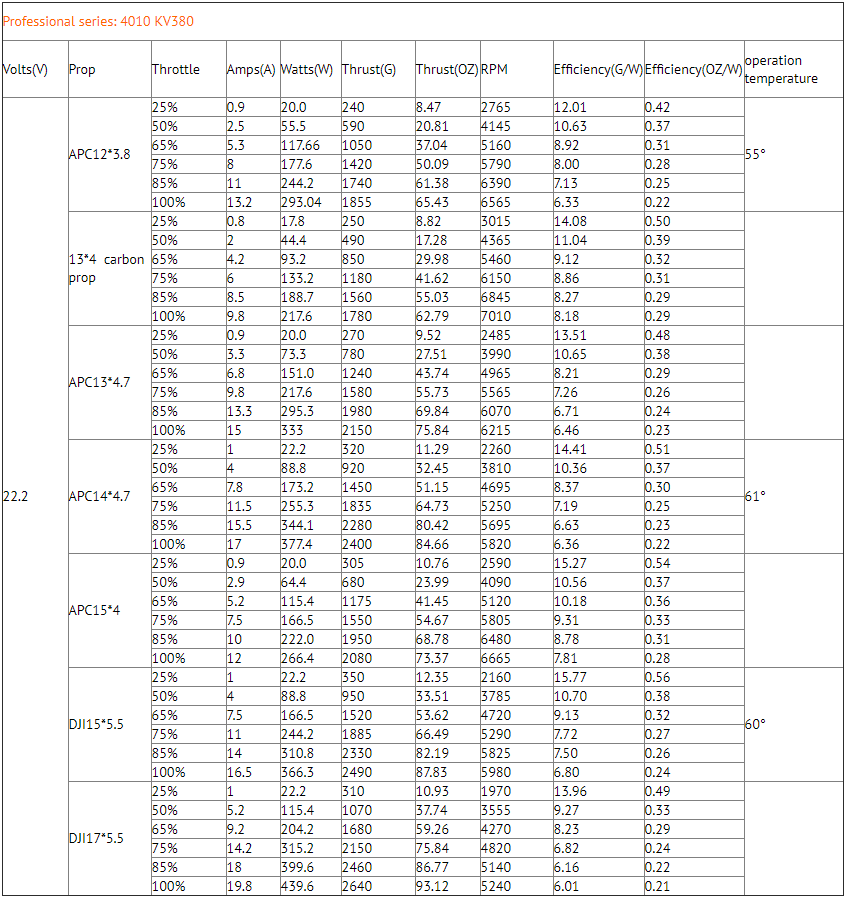
If you are looking at new motors, you can actually get pretty close just looking at the motor test data many motors provide. I recommend not purchasing motors that do not provide test data. Unfortunately, this typically means they cost a little more.
Have you seen something that looks like this? (this is the test data from https://www.hobby-wing.com/arris-4010pro-brushless-motor.html)
The goal is to have ~2-2.5 thrust-to-weight ratio. This should provide about equal throttle control both up and down, which is important on a hovering machine like a 'copter. Too much could mean it might not come down. Too little might mean it will struggle for control in adverse conditions like wind. That means we want ~2-2.5x the AUW in thrust at maximum, and we want the 45-55% thrust to be equal to the AUW.
Personally, I tend to spec my systems on the high side ~2.3-2.5 thrust-to-weight, and I have had good success doing so. I do not have alot of experience at the altitudes you are flying at, but I would assume that you might want to do the same to help account for the thinner air. And higher pitch props.
This is my process for selecting motors when tools like ecalc are not available:
- Take AUW and multiply by 2. (4.4kg in your case)
- Divide by number of props (4 in this case, obviously) results in 1.1kg for your copter
- Check motor voltage rating (4s vs 6s)
- Check motor test data for your prop size
4a. check 100% for min 1100g thrust. I prefer to have a little over head.
4b. Check motor test data at 50% for 550g (because we want the copter to hover at 50%, the thrust at 50% must be nearly equal to your AUW (2200/4)
- Select ESCs that are rated at or above the current draw for 100% condition
Beyond that, you can start to go down the rabbit hole and geek out over the efficiency rating (g/W). The higher the g/W number, the longer the flight time you will get on a particular battery.
Edit: I guess linking that motor might have been a little tricky of me. I think those would be a touch powerful for your AUW, but not too much.