Vibrations are bit of a problem, maybe not causing issues directly at the moment, but are getting into that trouble zone…
BATT_AMP_PERVLT is that correct? - only during 5 amps total during flight…
Some other battery voltage settings are at defaults or not correct - while connected to MissionPlanner press Alt A and set the correct prop size and battery information, then accept the values it offers.
That plug in might sort out some of the gyro/filter values too.
I would probably disable the static notch filter and probably start over with the harmonic notch filter after you’ve improved the vibrations.
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,2
For PIDs you can leave it as-is and see if vibrations and filters give enough stability to run Autotune, or I’d probably start with something relatively safe, like:
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_RAT_RLL_P,0.08
ATC_RAT_RLL_I,0.08
ATC_RAT_RLL_D,0.002
ATC_RAT_PIT_P,0.08
ATC_RAT_PIT_I,0.08
ATC_RAT_PIT_D,0.002
and see if you can get a stable hover.
If there’s still oscillations just follow the first fight steps in https://ardupilot.org/copter/docs/tuning-process-instructions.html to tame the oscillations.
I’m interested to hear what happens and see the next logs.
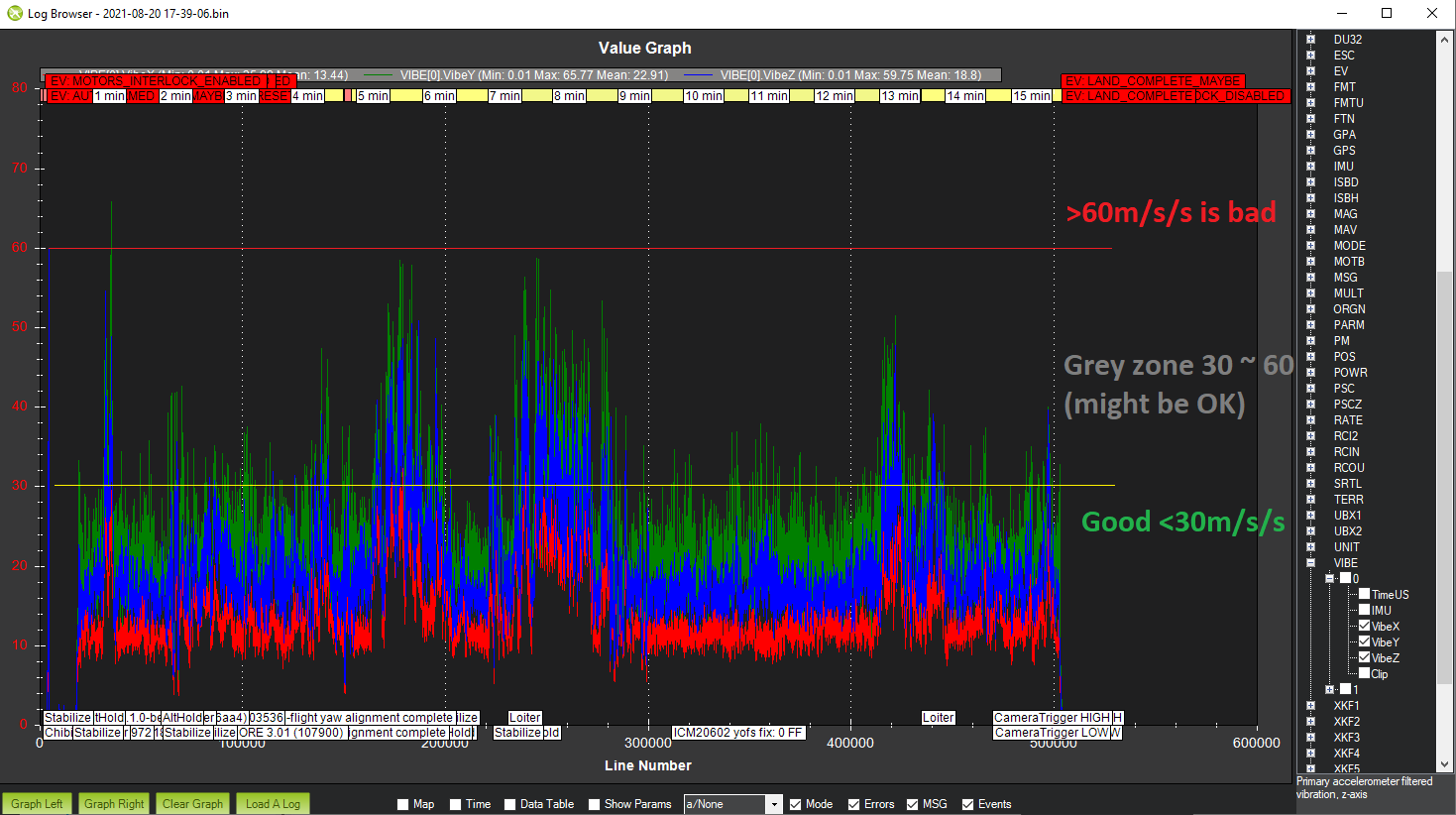
Yes, I agree with @xfacta that the vibrations are likely the problem (see wiki here). Short-term vibrations above 30m/s/s are OK but in this log the excursions are too long.
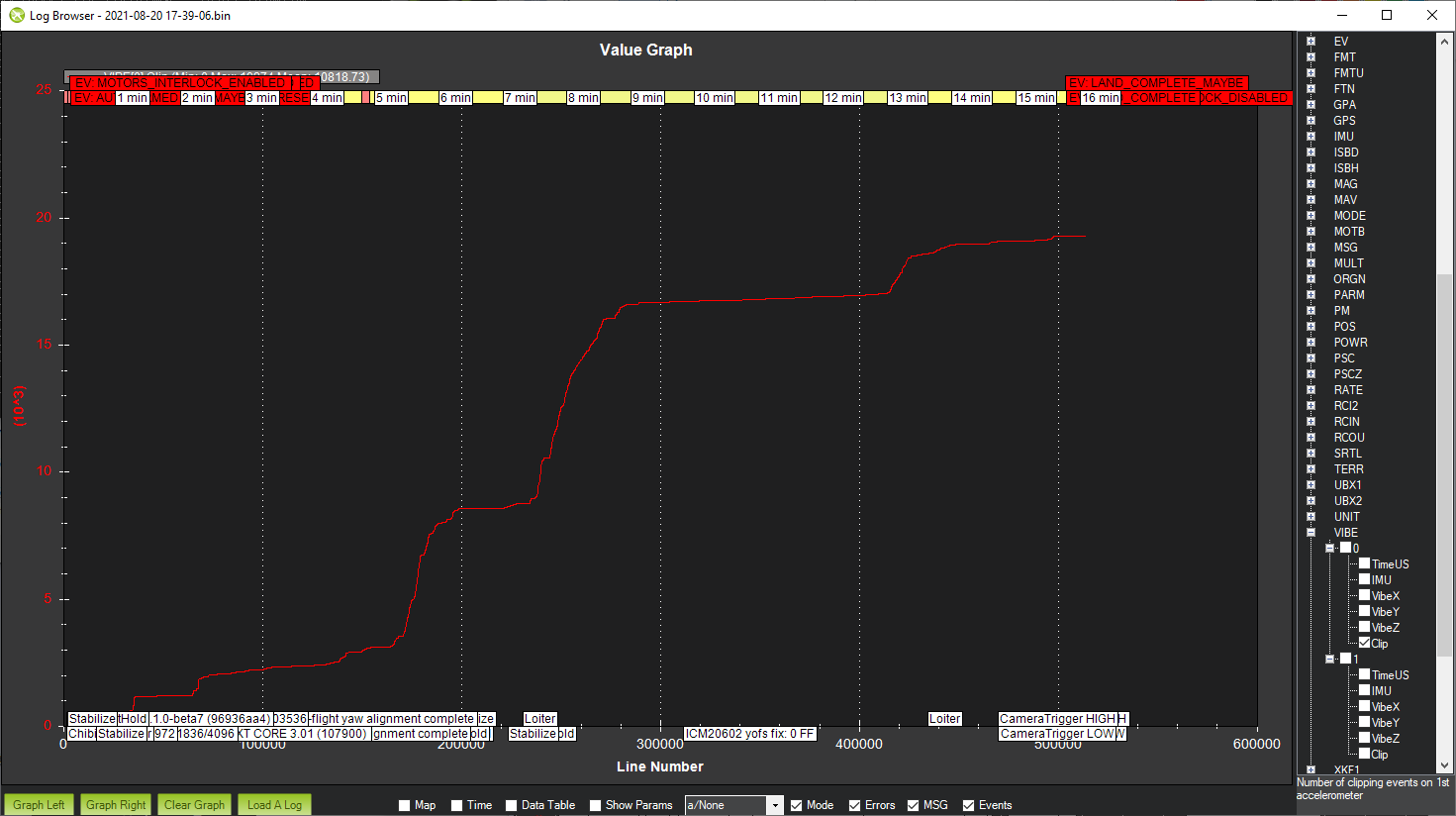
There’s lots of IMU clipping going on as well which leads to a loss of information for the EKF so it gets confused about it’s altitude and climb rate which don’t match the accelerations.
It is a 7 inch octaquad powered by 4s1p 18650 vtc6 battery. A bit overpowered as you can see from the required thust hover.
From the PID point of view I’m quite happy IMHO. system response is quite good any any condition.
Do you think can I improve vibration by improving the notch filter only? Considering how the FC (matek h743) is mounted and how many cables I got on it (almost all the pads are used) It is quite hard to do any improvement.
Should I disable static notch and only use the harmonic only ?
@xfacta I very recently installed a current sensor on this drone, it has flown many times with a different FC without and I still need to tune it so yes, current is low by 50% at least
Just as additional data, here is log and parameter for a 4 inch 250g quad. I have more or less the same issue LD 4 inch.param (19.6 KB) 2021-08-21 12-04-02.zip (687.4 KB)
I think I’m running into similar issues and I did see that BAT variable in my Auto Analysis. Also not getting any immediate response on my throttle increase in Althold, rather several seconds later it just randomly increases and wants to flip. If I dont immediately disarm. It flew one day and the next the propellers were all out of sync, giving vibrations and motor thrust loss in 2 and 3 on my quad. Of course last flight when I removed props no vibrations and motor thrust loss in 2 and 4🤣
I’ll be installing 3.6.9 to try and get stable build on terrain following today, and that will tell me right away if my motirs actually have issues or if it’s beta 4.1.0 b7. I’ll definitely say something if 3.6.9 works.
You don’t need a static notch. I would flash the Bdshot version of firmware, you will have a better reference for the Dynamic Notch filter. Not sure why you chose 66Hz for the filter frequency but it’s ESC telemetry based anyway and working OK.
And you don’t need this. SERVO_BLH_MASK,3135. Well, maybe you do for servo’s.